Note that the parameter values shown above are the ones for the “generic_250” config (4050). You can get them automatically by changing to that airframe using QGC.
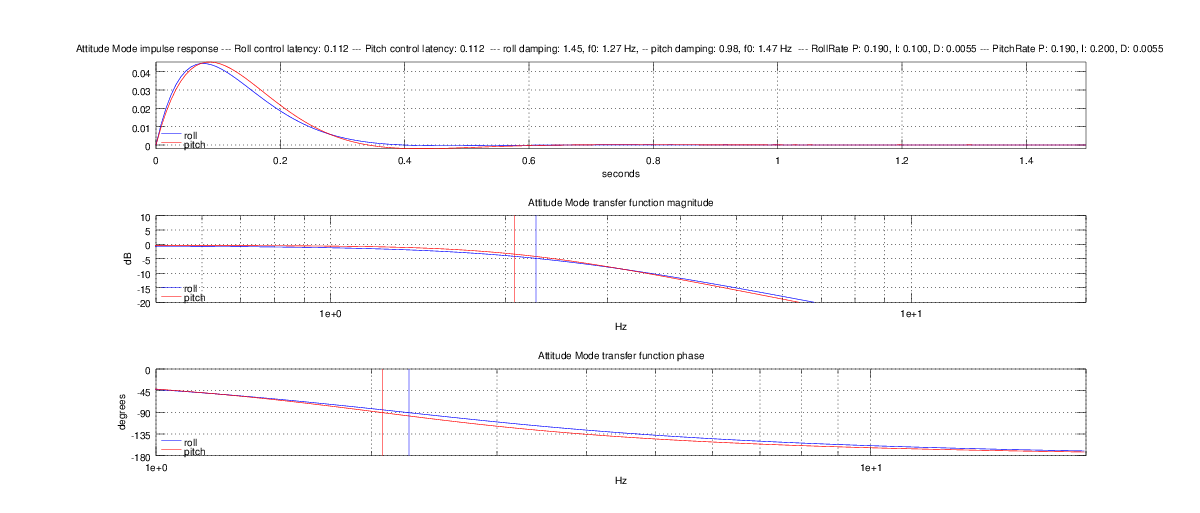
Here is the impulse response analysis for roll and pitch rate control (acro mode) on the S250 with the above parameter values, The control latency (delay from rate setpoint to vehicle motion (gyro output)) is only 40msec for both roll and pitch. The closed loop system is slightly underdamped and natural frequency is about 5Hz

Roll and pitch angle control latency (stabilize mode) is 112msec for both axes:
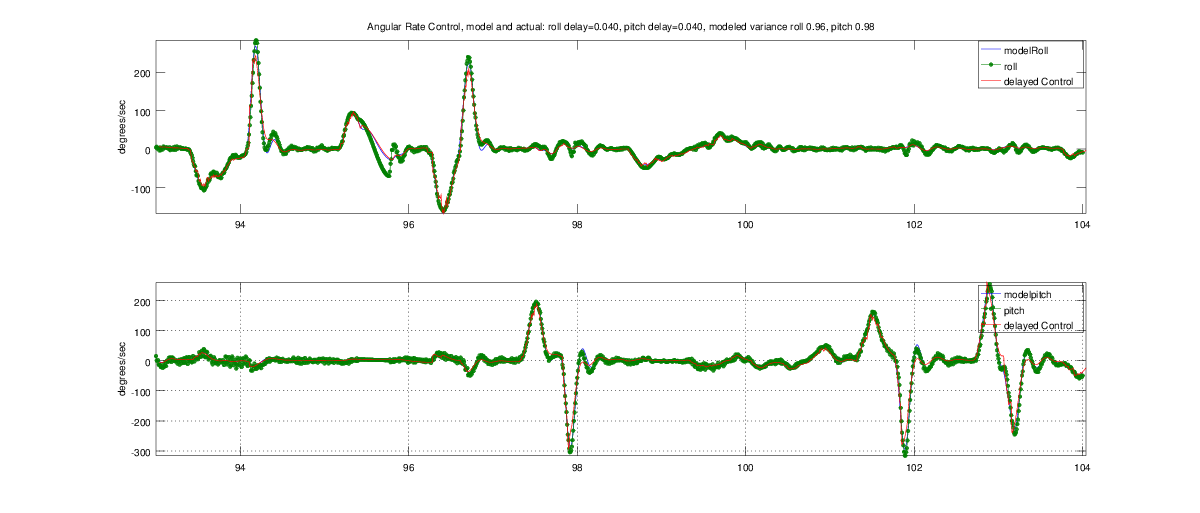
This is a plot of the rate control signal (delayed by 40msec) against the modeled and measured rates. The model is accounting for more than 95% of the measured response:
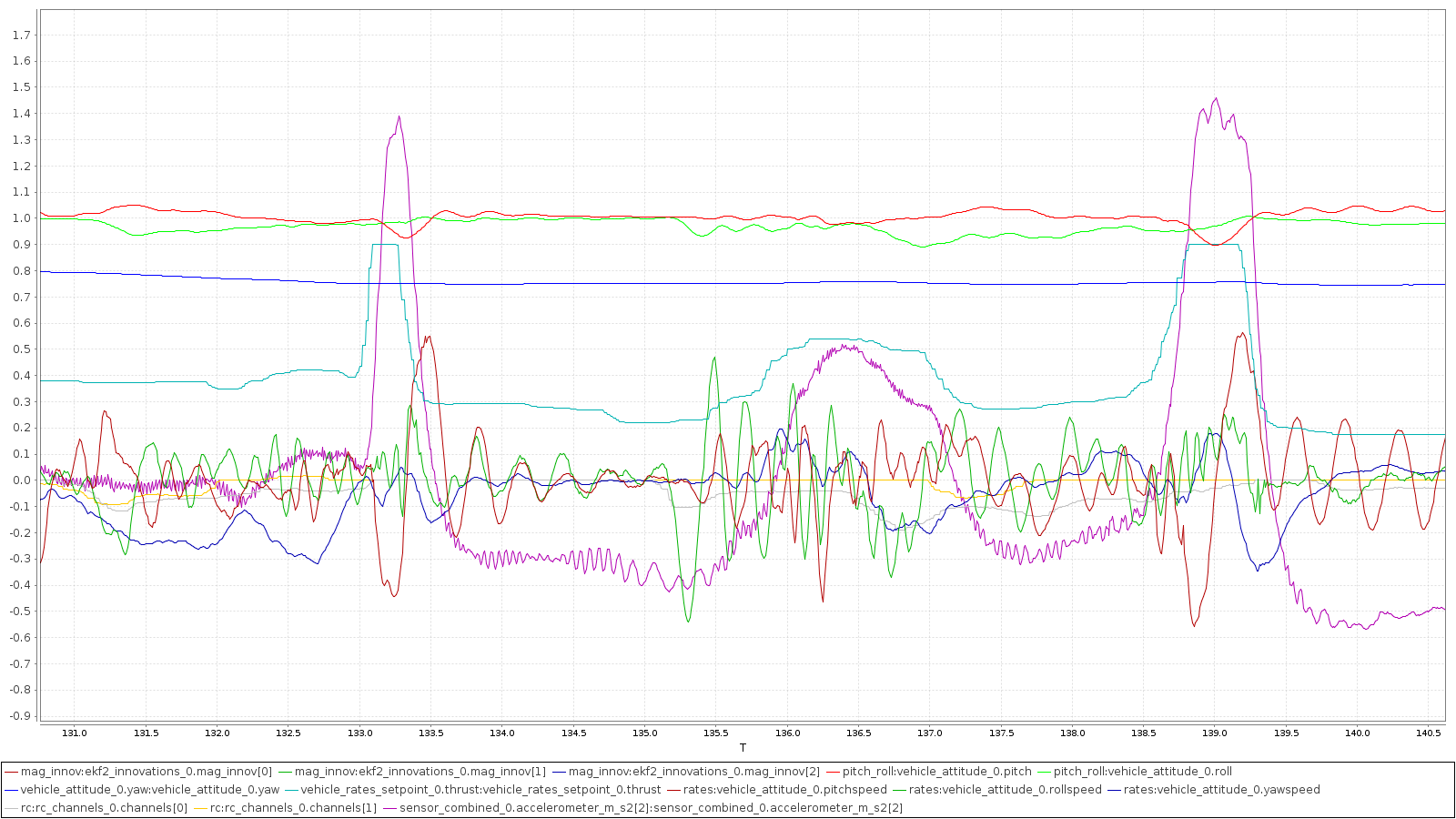
This plot shows that there is no oscillation at full throttle. (roll/pitch/yaw angles are offset +1 radian, z accel is scaled and offset such that hover is zero and freefall is -1) The slow oscillation in pitch is probably due to the low throttle setting during descent, and suggests that it might be beneficial to ramp the P gains up below the TPA breakpoint:
full log: Flight Review