In a position control flight with x4 having 1.5.5 PX4 and Pixhawk, the GPS satellite number decreased to 4 in the air and it lost its horizontal place in 160 meters. We switched to manual mode via RC commander but we couldn’t even control the x4 in the air, then it decreased altitude and crashed to land with rotating.
The log is :
http://logs.uaventure.com/view/CTNkVwWX2UCgFcy7k3ne3a
Any help will be appreciated.
BR,
Hi,
at first you have some changes in your settings about GPS EPV and EPH? you have bad precision of GPS and you shut not be able to change mode to position control. (If im wrong hope someone correct me)
http://logs.uaventure.com/view/CTNkVwWX2UCgFcy7k3ne3a#GPS_Uncertainty_PLOT
But this is probably not cause of crash, moment before your switch to Manual oll motors go to max power
http://logs.uaventure.com/view/CTNkVwWX2UCgFcy7k3ne3a#Actuators_PLOT
so there is no more power to be able to stabilise
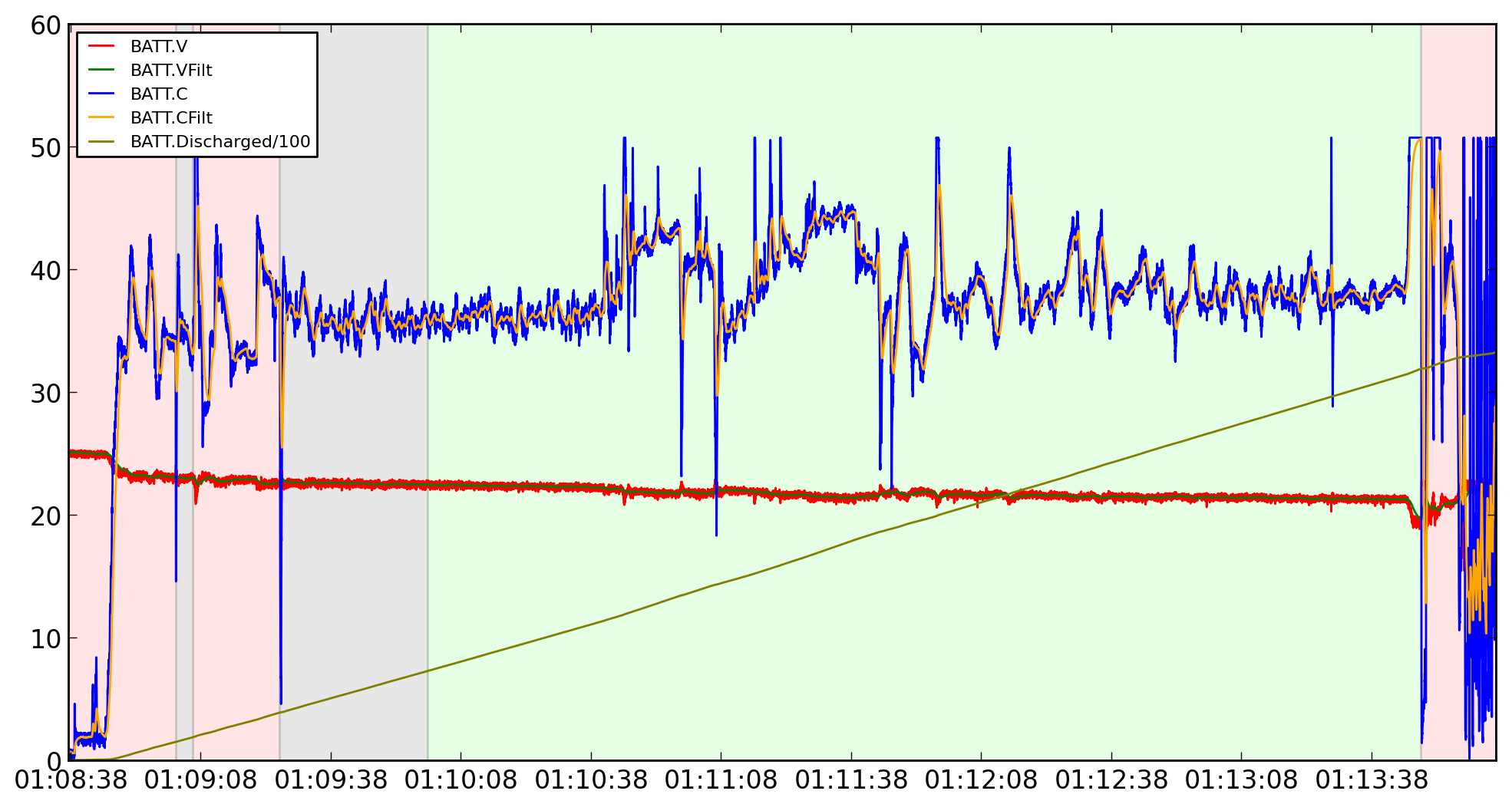
If you watch battery condition you can see your battery drop to about 20V
If you are using 6S pack 20V is 3.3V per cell - battery is empty is my guess
BTW you can try to reduce vibrations on your frame, is not so good
Hi @David_Kraus,
Thanks for your support,
You are right that with these EPH and EPV, it is not safe to fly with pos_ctrl or Hold,
I have measured the Tattu Lipo capacity after the crash, btw yes it is 6Sand 12000 mAh, it said %62…
But there may be something about the battery i guess.
Where do you live? Is there winter now? If yes and Lipol battery is cold(5°C and less) it reduce available capacity very much.
Hi @David_Kraus,
The temperature is near 2°C. Now I measure the Lipo cells capacity and they are all near 3.9V and their capacities are around 62%.
What may be the cause of crash in manual mode (the PWMs are being saturated and no control is allowed from RC)
I think I should check the ESCs and motors right?
BR,