Hi PX4 team,
I was wondering if there is any plans to include a wind estimate without the need for an airspeed sensor? Like the one used in ArduPlane by Premerlani.
Best regards,
Michael Larsen
Hi PX4 team,
I was wondering if there is any plans to include a wind estimate without the need for an airspeed sensor? Like the one used in ArduPlane by Premerlani.
Best regards,
Michael Larsen
Hi Michael,
This is a work in progress
Hi Carl,
Sounds great. I can’t tell immediately, but will this be part of the stable branch in near future?
/Michael
I’m just curious, how well does it work in ArduPlane?
Well, I don’t have any truth sensor to compare with. But it is my impression that the wind estimate, magnitude and direction is rather good. At least it gives an idea. I find that especially the direction is useful in order to make a good landing approach.
This is the estimated wind direction from a flight without airspeed sensor.
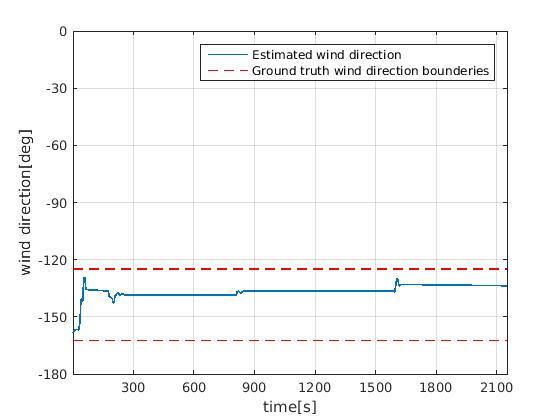
The red lines are the min and max values from a ground truth wind direction sensor on the ground with a resolution of 12.5 deg.
Unfortunately the part of the the ground sensor measuring the wind amplitude broke just before the flight (due to too high winds…) My impression is also that the wind direction should be pretty accurate from the estimate, but more data has to be collected to evaluate further.
Hi Carl,
That looks promissing. Are the small “jumps” in the estimate, at ~800 and ~1600 when the plane is turning?
Hi
I used the synthetic sideslip wind estimate without an airspeed sensor on the 1.5.5 release - and it worked Great! I Have tried to do the same with the 1.6.2 stable release but I can not get it to work correct. All I get is something that looks like estimation noise with a magnitude of 1/10 of what I assume is the actual wind speed.
I am using the parameters described in https://github.com/PX4/ecl/pull/207
Am I the only one that is getting this wrong?
Hi @Johannes
Glad that the sideslip fusion was working  If you have problems now after updating, could you please describe the issue and link a logfile here https://github.com/PX4/ecl/issues
If you have problems now after updating, could you please describe the issue and link a logfile here https://github.com/PX4/ecl/issues