Total Flights: 39
PR’s (Assigned / Tested) 3
PID autotuner for velocity loop #12479
introduce uORB::SubscriptionBlocking and use in navigator and simulator #12371
sensors: create vehicle_angular_velocity module #12596
Issues reported: 0
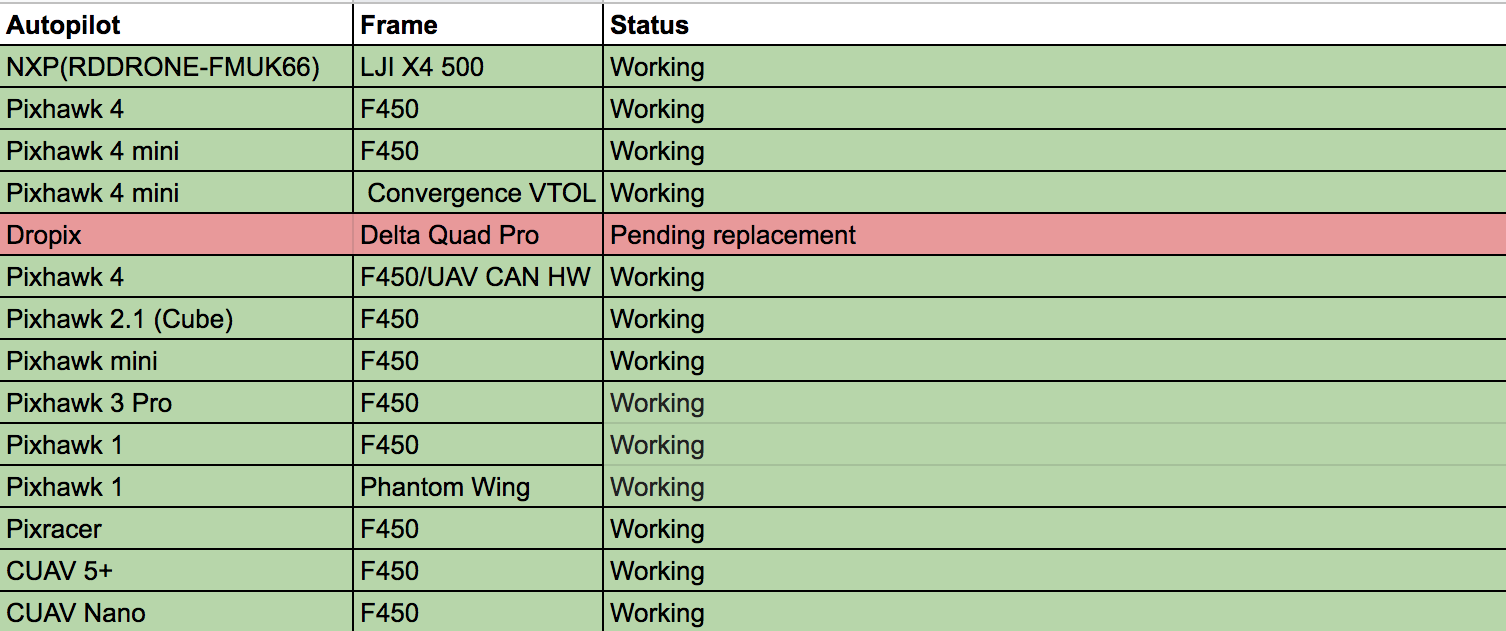
Vehicle Status: