PX4 development testing done by the Dronecode Test Team
Total Flights: 35
PR’s (Assigned / Tested) 6
Multicopter auto - Yaw at waypoint before move #12348 Open
Improve magnetometer consistency check #12334 Open
rtl: implemented RTL based on cone shape #12382 Merged
Adjustable land speed via RC #12220 Open
update NuttX to 7.29 #12344
Auto - Update velocity setpoint generator to avoid overshoot at high cruise speed #12417
Issues reported: 0
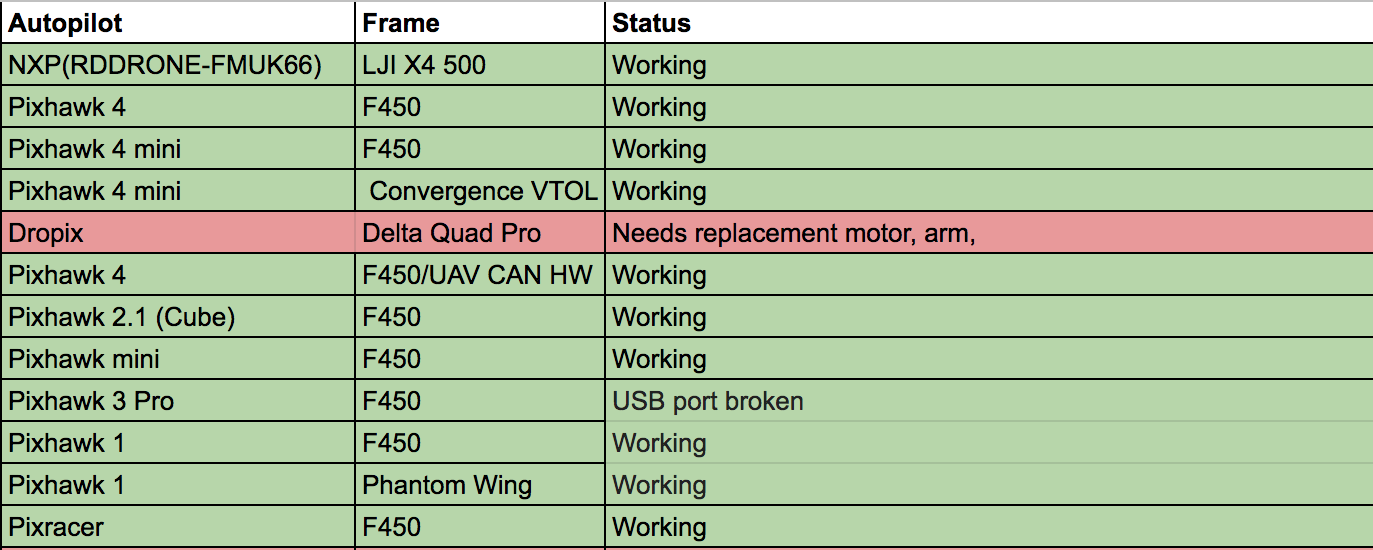
Vehicle Status: