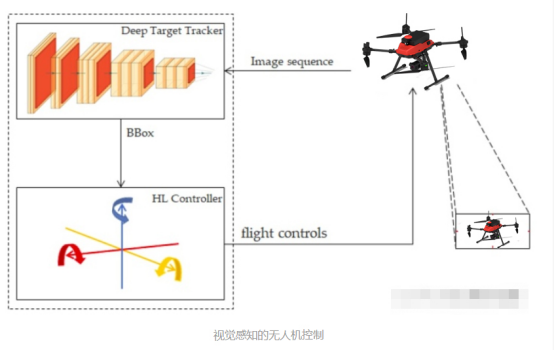
As the name implies, the vision-based quad rotor UAV takes the onboard camera as the perception system, just like the human visual perception system, which is used to provide the positioning, navigation and perception functions of the UAV. Currently, researchers use vision to make machines visually locate and navigate, Visual Inertial Navigation System and Visual Detection, Recognition and tracking System DRTS (Visual InertiA-based Odometry) are developed and developed with Visual InertiA-based Navigation System Tracking System). There are also direct end-to-end computer vision approaches, in which machines perform actions directly using streams of images, which have been widely studied in autonomous driving. Firstly, the on-board camera captures the image stream and performs real-time processing on the image stream, including low-level processing (filtering, boundary detection, corner detection, region matching, architecture detection, morphology calculation, etc.), intermediate processing (image segmentation, object detection, object recognition, etc.), and advanced processing (semantic understanding, etc.). Then it obtains its position information (navigation information) and target information (target tracking). Finally, it uses the onboard computer to generate path information and control instructions, and the flight control board controls the rotor to maneuver and complete the set target.