My big quadcopter started spinning in yaw direction (as far as I remember it spinned CW and CCW after pushing the sticks hard) on its second flight which caused it to crash hard. I had decent flight performance for some minutes (gps, compass and baro were working brilliant) but then it crashed eventually. I was flying in Stabilized mode when it happened. I changed to PositionHold and back to Stabilized again, no effect. From what i could see, all motors were spinning, none of them stopped. After inspecting the defective copter i couldnt find any kind of problems, mechanical and eletrical (despite the crash damage of course). RC was intact until the end. Maybe someone is able to find anything in the logs.
http://www.filedropper.com/log52016-6-10-12-47-14
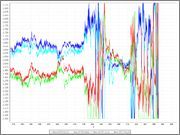
Motor output 1-4 at that specific time
Regards,
David