in the TECS block, the throttle and the pitch angle setpoints are supposed to be given to the attitude controller,
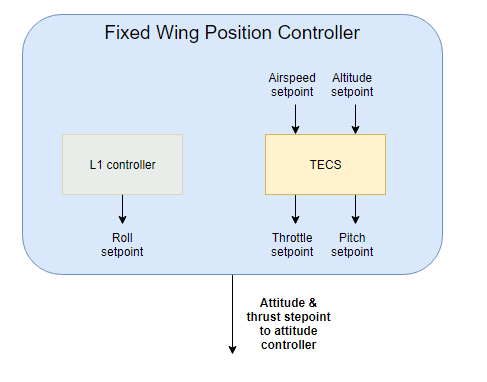
however, in the attitude controller section, the throttle setpoint is nowhere to be found.
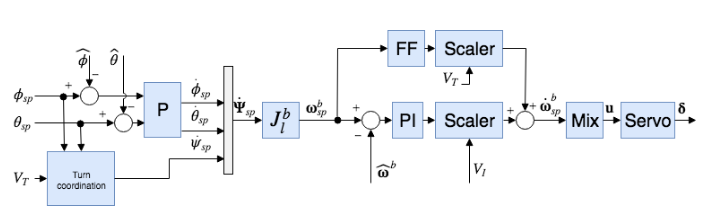
we are trying to model the thrust control loop on SIMULINK.
So, any idea on how the thrust is controlled using the throttle setpoint outputted from the TECS?
Any help would be appreciated.