Hello,
I want to test gripper.
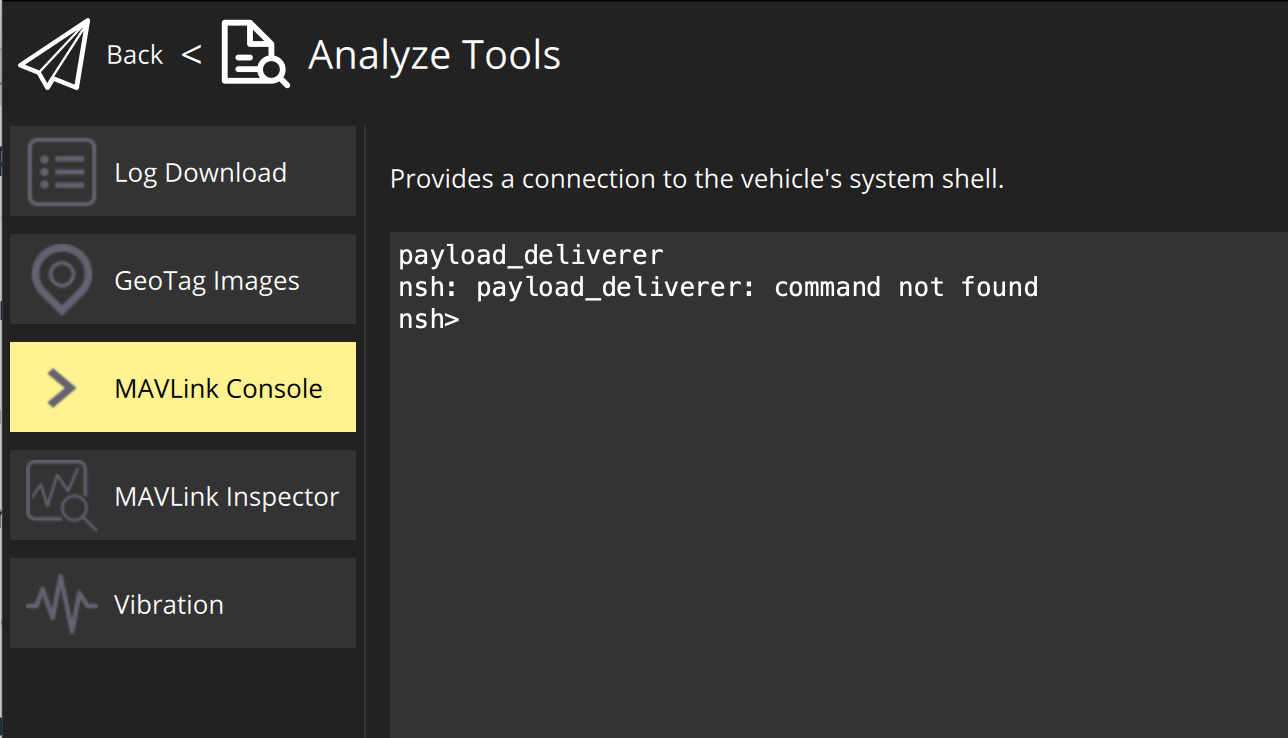
First, I tried to use payload_deliverer. So I followed the steps in px4 user guide. Grippers | PX4 User Guide (main)
But it is not working. It makes error that “nsh: payload_deliverer: command not found”.
I also tried to use MAVLINK parameter GRIPPER_ACTIONS. But I don’t catch how to use it.
https://mavlink.io/en/messages/common.html
What should I do?
And I also want to make application that operates gripper. In application I use MavSDK python version. But there is no related functions in mavsdk python. Do I have to use mavlink.send_message() and send mavlink command?