The board I have is an older one, it is a 3DR PX4 FMU V2 2.4.8, year 2013. Im trying to get telemetry from the FC to the X8R to the Taranis X9D. I have the cable and adapter for converting the signal from the SPORT to the X8R
. The TEL_FRSKY_CONFIG param is missing, and i cannot find it in the parameters section in QGC. Ive read i need to enable the driver or build the firmware with it included. also ive been told that it has limiter flash so it may need to be enabled while something else is disabled for it to be included in the firmware and show a parameter in QGC. I am new to all of this as far as working with the firmware and coding as such. and was wondering if anyone could help or at least be willing to walk me through the process. Thanks.

Could you confirm the size of flash, 1MB or 2MB ? For old ones, it was 2MB but I don’t know how old your board is, maybe you could check it by removing the cover and see STM32 microcontroller inside it.
I do believe QGC shows it having 2mb. Flash size: 2080768 (2mb), is what it shows in QGC. Its a (Pixhawk 1 FMU v2) - *Brand - 3DR - PX4 FMU v2 2.4.8 2013 manufacture date *(8 covered by a connection). I was told i could possibly upgrade to the firmware for the V3 version but am unsure how to do that. And the telemetry parameter may be omitted or commented out, in the firmware ive read, but i am new to this and am unsure how to rectify that, re-build the firmware and upload it. Ive been told it’s an easy fix, but so far ive not found the answer. Thanks.
Hi, do you use Linux at all?
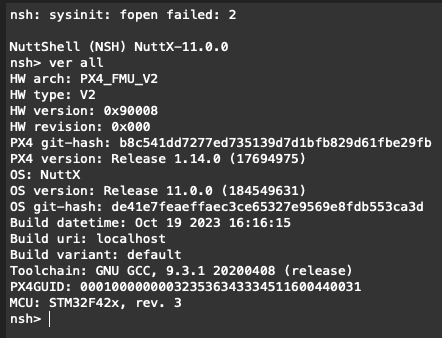
Also, can you check which firmware the flight controller is using at the moment? To do this, open the mavlink console tab in qgc and type “ver all” and then attach a screenshot of the output here and I’ll take a look.
What you’d like to do is fairly straight forward, but it’s probably easiest if I just give you a copy of the firmware with the frsky_tel_config enabled whilst still matching the version that you’re using.
I have not used Linux, but will be shortly for the Companion computer going on the UAV. That’s from the MAVlink console in QGC. THANKS!