First post here. Want to start by saying thankyou to the community. I’ve learned so much lurking through these forums and reading the extensive manuals created by you dedicated people. I’ve been able to get my own DIY TBS Disco working great (until it decided to destroy itself), and I’m very happy so far.
Here is the flight log from the ill-fated flight.
https://logs.px4.io/plot_app?log=6e1d5fa1-8c97-4b1c-b44a-261d175de857
I am testing my DIY TBS disco in a remote location to avoid any harm to people or property. Today I was testing the return to home failsafe for data loss. The test passed successfully so I took off again and proceeded to go on a small circuit.
I was controlling over Mavlink and flying the drone in Hold mode. Simply clicking on the map where I wanted it to go. When I got back close to the takeoff point, I decided to switch to position mode. I forgot to put the throttle on (hold mode doesn’t require throttle, or any inputs actually) so the quad started trying to land. I put it back into hold and back up to 27 metres. Then I engaged throttle and went back into position mode. Everything was working perfectly at that point and I proceeded to test various manual inputs until the battery reached 30% on QGC.
I was then just in the process of moving the copter to the landing zone when it went into a violent continous roll and impacted the ground. Much damage ensued. As it was rolling to it’s demise, I tried engaging return to land mode in a vain attempt to get it to sort out its problems but no luck. Flight log suggests that the roll began at or just after 28:21:400.
On arrival to the scene the flight controller was still powered and the motors were disarmed. I recovered all propellers however, one prop nut(cone) was missing. I’m using the prop mounting system supplied with these motors (https://hobbyking.com/en_us/multistar-elite-4006-740kv-multi-rotor-motor.html).
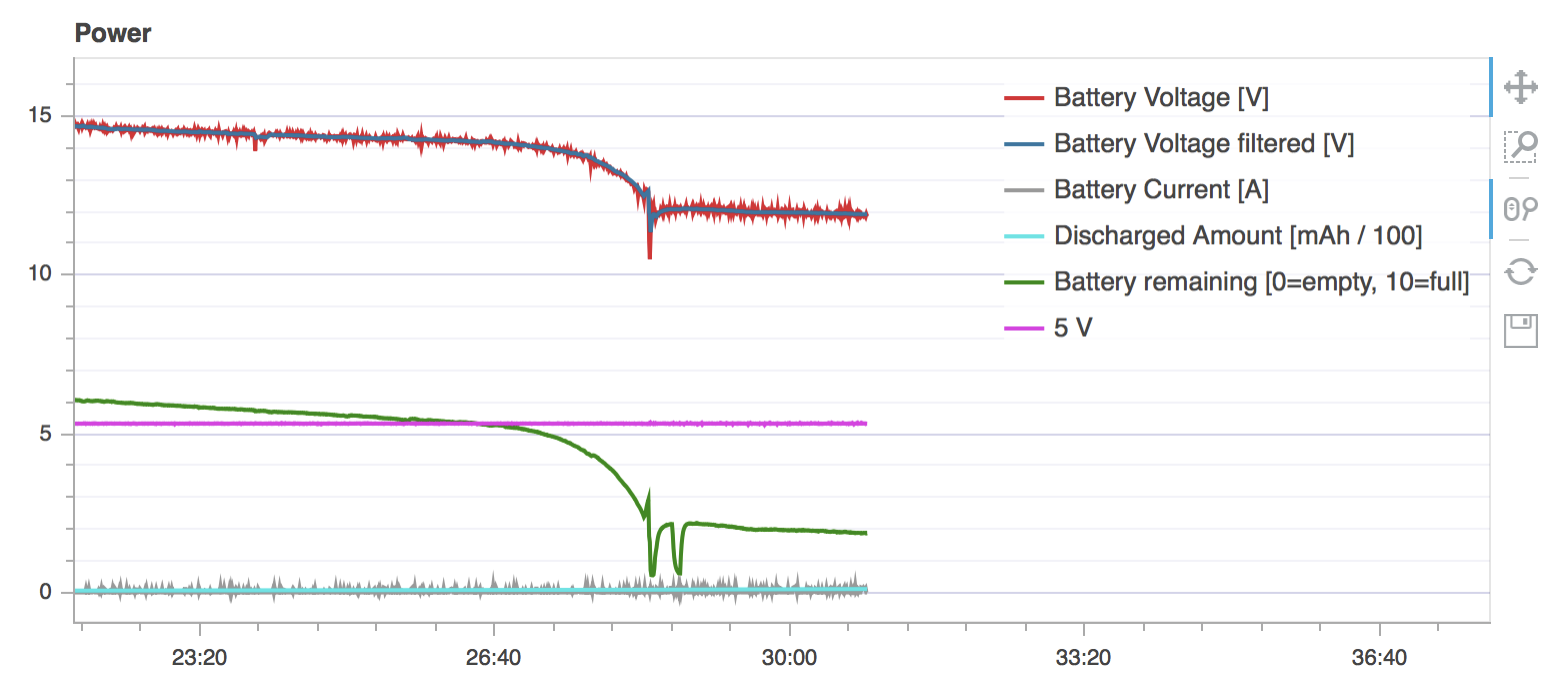
I plugged the battery into the charger and it reported that there was still over 12V remaining. This, coupled with the fact that the flight controller was still powered after crash suggests that this was not due to a sudden power failure. Furthermore, the roll was continous until impact which suggests that the roll was powered. I can’t remember exactly what the props were doing but I don’t think it’s possible that it could maintain a continuous 360deg roll without power.
I am thinking that somehow the prop cone came off in flight and that caused one propellor to become critically unbalanced, thus sending the copter into the roll. I appreciate others taking the time to look at the log and letting me know their thoughts. As I mentioned the roll begins at about 28:21:400