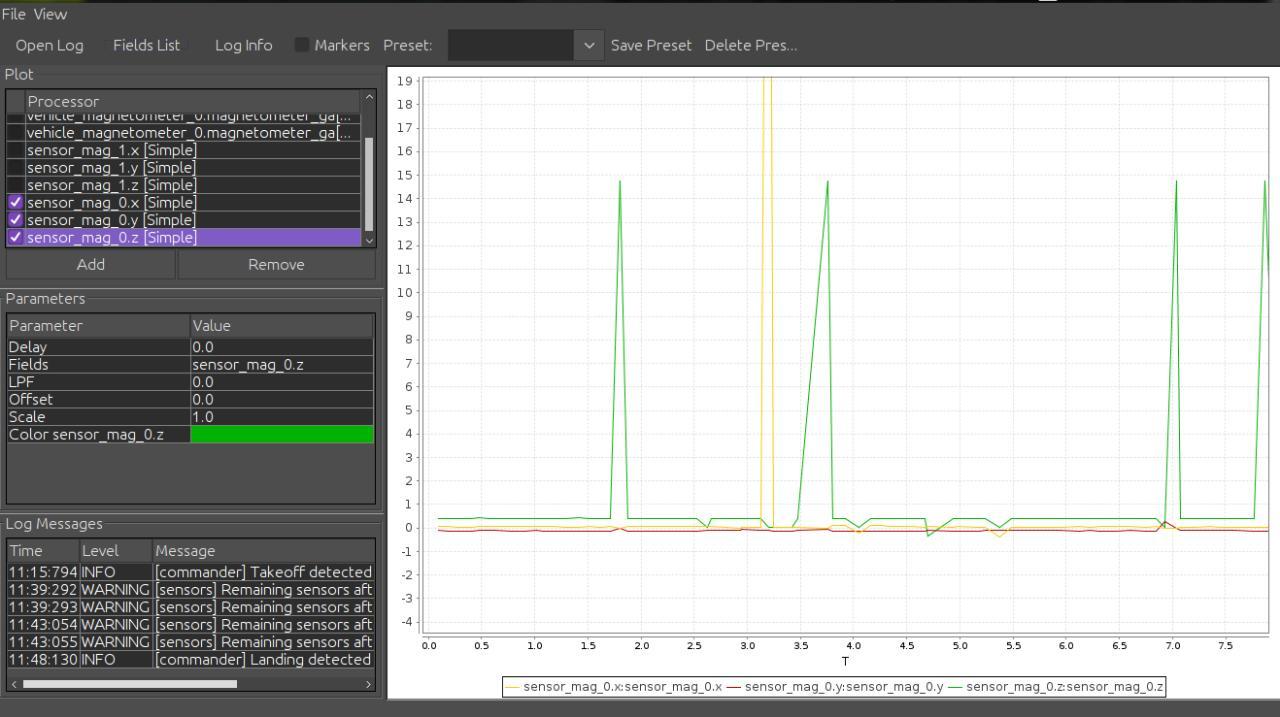
I continue to see the these glitches. Some of them are П-shape like on the plots above, followed by MAG #0 fail: STALE! message, and some look like pikes:
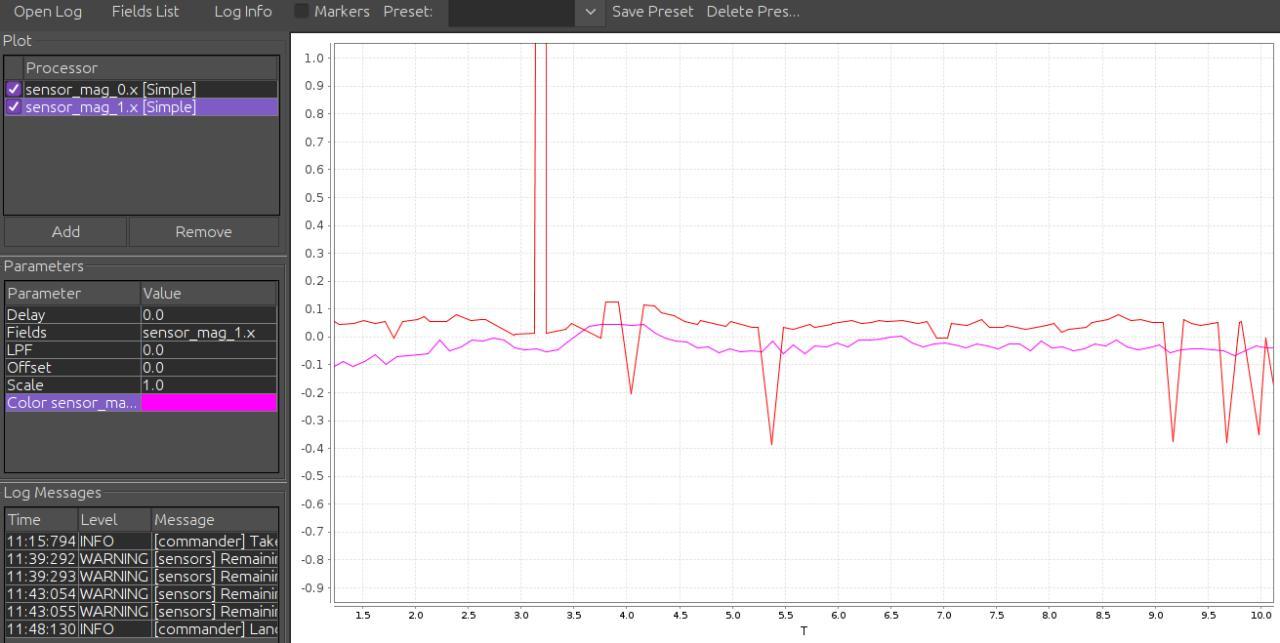
Comparing the x-axis data to the corresponding INTERNAL mag:
@CarlOlsson can you please specify the model of magnetometer you use (is it here2?), do you connect it over I2C or UAVCAN and what is the voltage on your board?