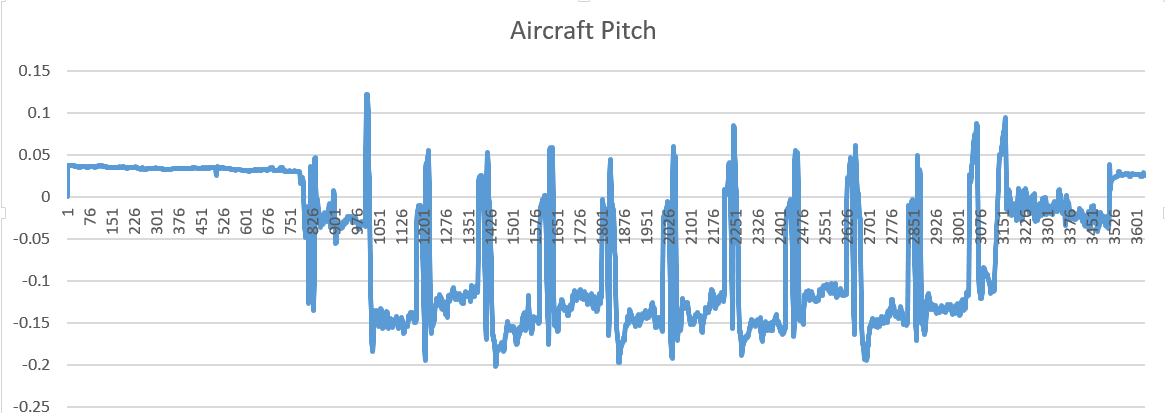
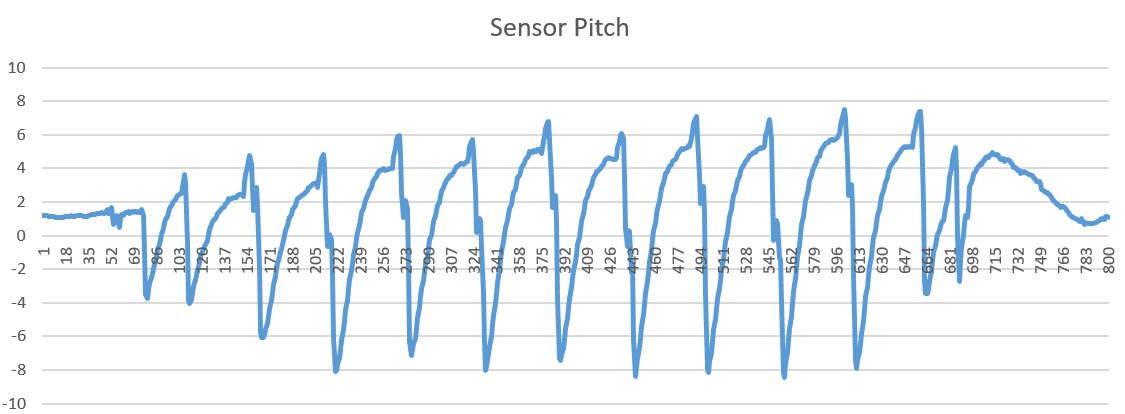
Is there a way to tune the weight of the various sensors that go into the EKF solution? We are trying to incorporate PX4 into a sensor (not aircraft) and have attached it to a 1 dimension (pitch) gimbal. We set the gimbal to stare nadir and the aircraft is flying pretty smoothly but the EKF output from the sensor output doesn’t look right. I think the EKF is forward looking and trying to predict but is getting so little motion in pitch due to the gimbal that it can’t resolve. Does that make sense?