Hello,
I would like to know if there is any possibility at the moment to perform an RTL with terrain following.
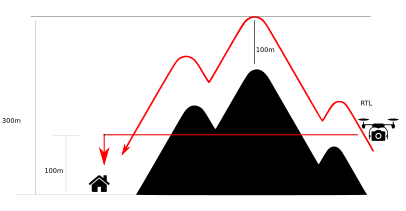
In the picture, we follow a mountain, at a certain point, RTL is triggered. The safetest RTL altitude would be 300m, above 120m allowed. May be with an onboard distance sensor?
Maybe using Mission path return ( RTL_TYPE=2 )
I cannot find any information regarding “landing pattern” How is this defined?
You can use single point LiDAR for terrain following. I am working in Benewake. We manufacture LiDARs.