I am using PX4 Version 1.10.1 running on the cube. The companion computer is running a 2D SLAM and we want to control a rover those configuration is similar to UGV R1.
RC is working fine, we can control the rover (move forward only). When I switch to offboard mode and try to use mavros/setpoint_position/local the rover does not move.
Now I am guessing it is probably a problem with the parameters. From my understanding what is been implemented is somehow similar to the L1 controler from ardurover (Rover: L1 navigation overview — Dev documentation).
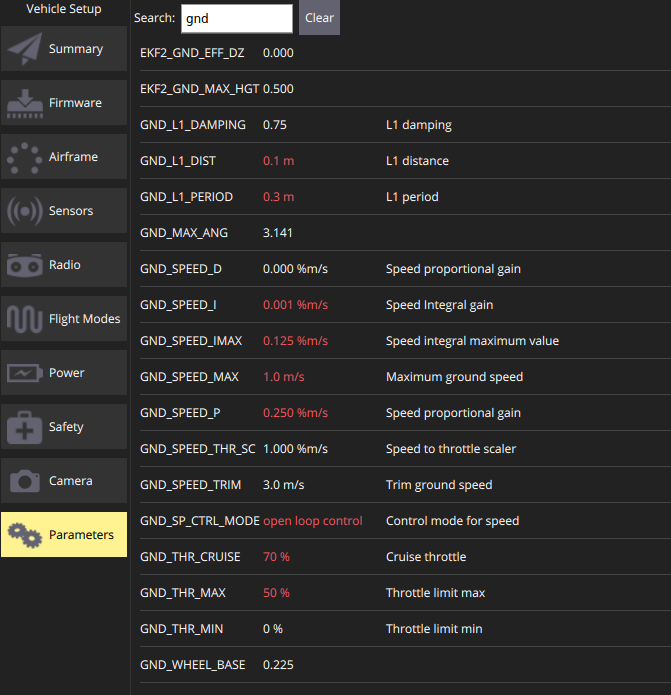
If I am right, here are the values of the parameters I set up:
My understanding:
GND_L1_DIST is the distance from the waypoint considered as “goal reached”
GND_L1_PERIOD is fixed and I assume that is equivalent to L1_dist on the picture included in Rover: L1 navigation overview — Dev documentation
GND_DANPING as the same meaning as in Rover: L1 navigation overview — Dev documentation
Can someone can help me please to understand why the rover does not move and if my understanding of the parameters is correct?
Thanks