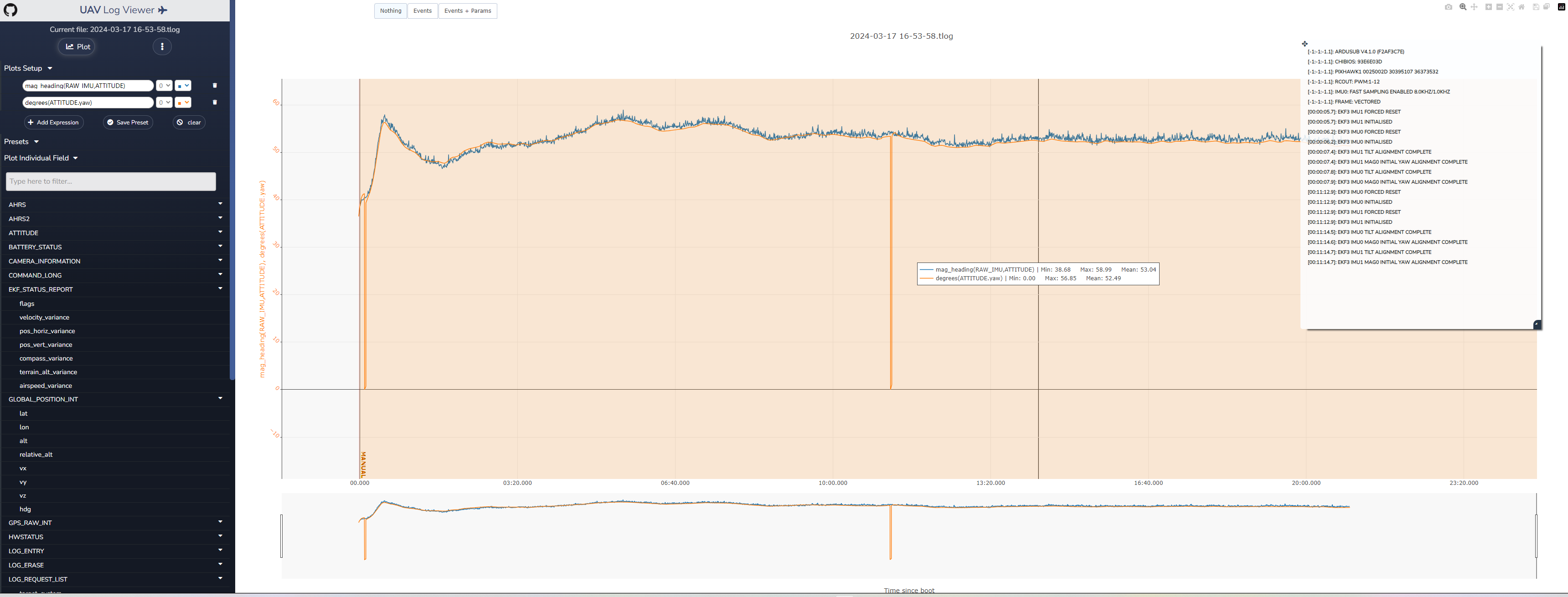
The heading angle output from my EKF3 always gets reset and cleared to zero. I’ve checked the logs and still can’t see the problem. Can anyone please help me?
Some people have analyzed that it may be a problem with the accelerometer and needs to be recalibrated, but I feel that my accelerometer data is correct.
Better to ask about ArduPilot at discuss.ardupilot.org
OK, thank you! I’ll give it a try.