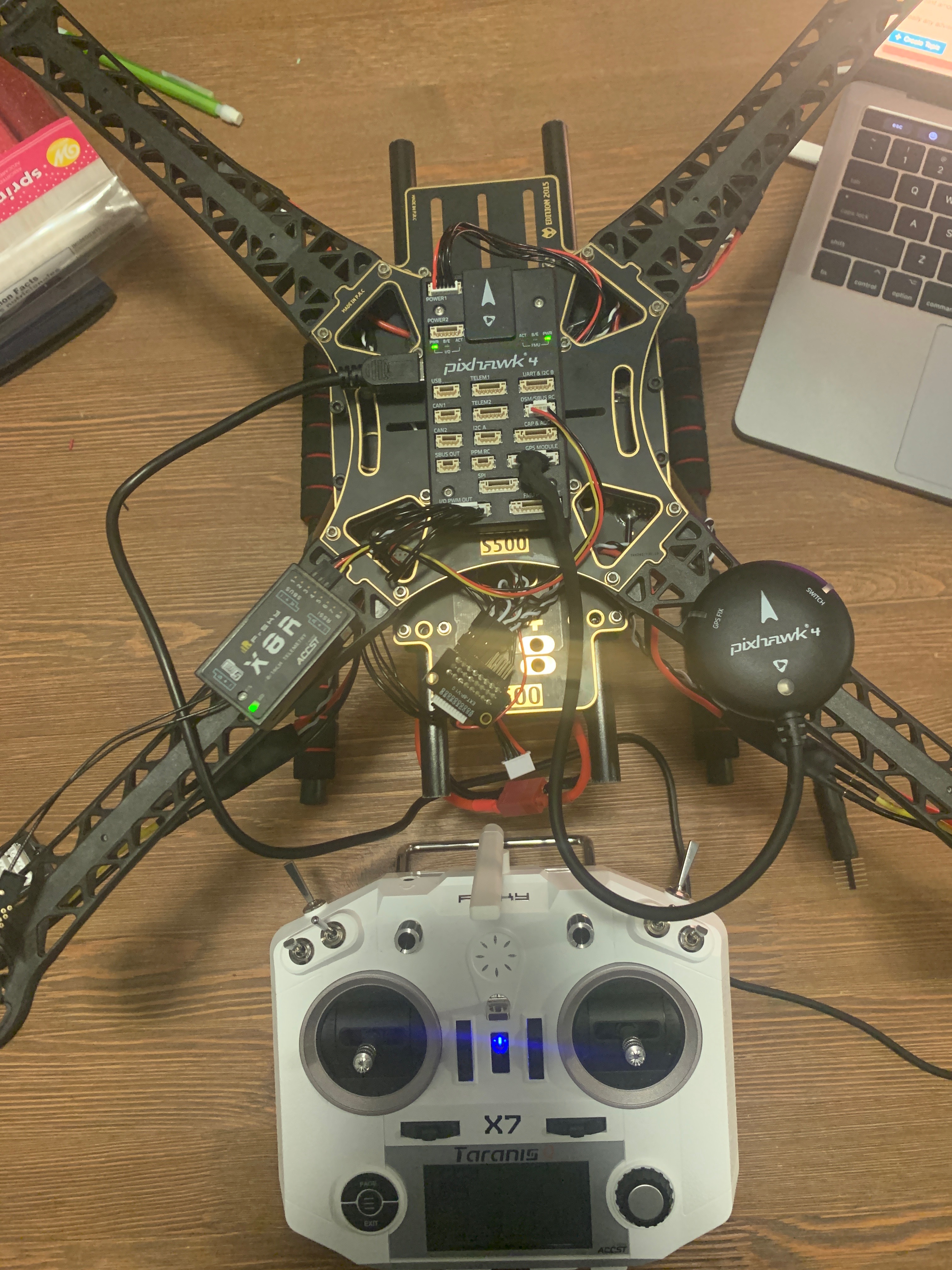
Hi, I am new to drones and have been working on the PixHawk4 using the S500 quad copter and since calibrating it onto QGroundControl the motors have never spun or even moved. I am not sure if this is a hardware or software issue, but everything else is giving accurate readings and lighting up the way it should.
I have heard that it could be having difficulties because of the GPS module, which I did the least amount of calibration to.
Really any advise is helpful, I am feeling pretty defeated right about now.