I have a question about the motor axis and omnicopter configurations. Thanks for much for anyone who can provide some help, as I have been lost in omnicopter for a while (quadcopters have been fun but not omni so far :(( ) Really appreciate in advance. 
I’m currently using H7V1.3, and 2 Tekko32 65A with 8 Rapter 2000KV motor and 3D printed cage.
In the configuration files it listed the motor axis was not flat (Omnicopter | PX4 User Guide (main)), but I noticed that fig1(image.png) also said it only works for VTOL, wanting to make sure that this is okay?
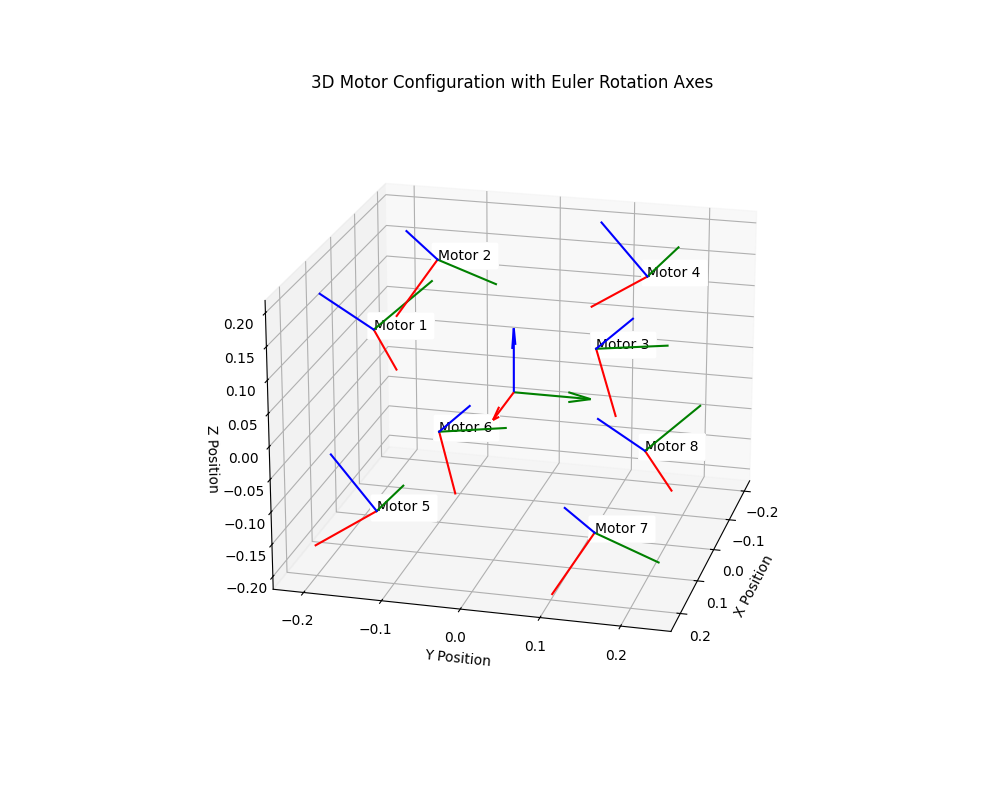
I have ploted the motor orientation based on the omnicopter’s configuration interpreting the axis as euler translation (is using Euler for axis orientation even correct?), and it looks like this (orientation.png).
From this picture it looks quite different from the picture on the omnicopter page. I’m wondering which one to follow?
1 Like
 Community Announcement
Community Announcement Community Q&A (No deep technical discussions)
Community Q&A (No deep technical discussions) Guideline for asking a Question
Guideline for asking a Question