Good morning
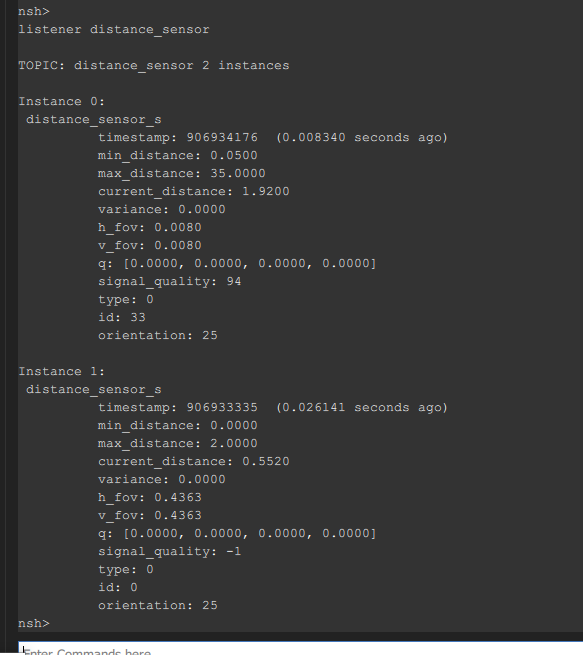
I would like to connect 2 distance sensor on my pixhawk 4 (1 for altitude and 1 for collision detection). I’ve connect a Garmin V3 and start it with the parameter ll40ls and a ranging sensor VL53L0X starting it with the commande vl53L0x start -X. I can see that the 2 instances work well in the mavlink console using the command line (listener distance_sensor) but in the mavlink inspector and the log there’s only one sensor, the ll40ls :
I’ve got the same problem for my rpm sensor. I can see the value change in the mavlink console (pcf8583 start -X + listener rpm) but in the mavlink inspector there is no topic rpm and in the log file
only “0” are loaded.
Can someone explain me why I can see the value of my sensors but they are not logged/display on the ulg ? Or have you got any flowchart of the publishing/logged of data ?
Thank you in advance
Forestal Maël