-
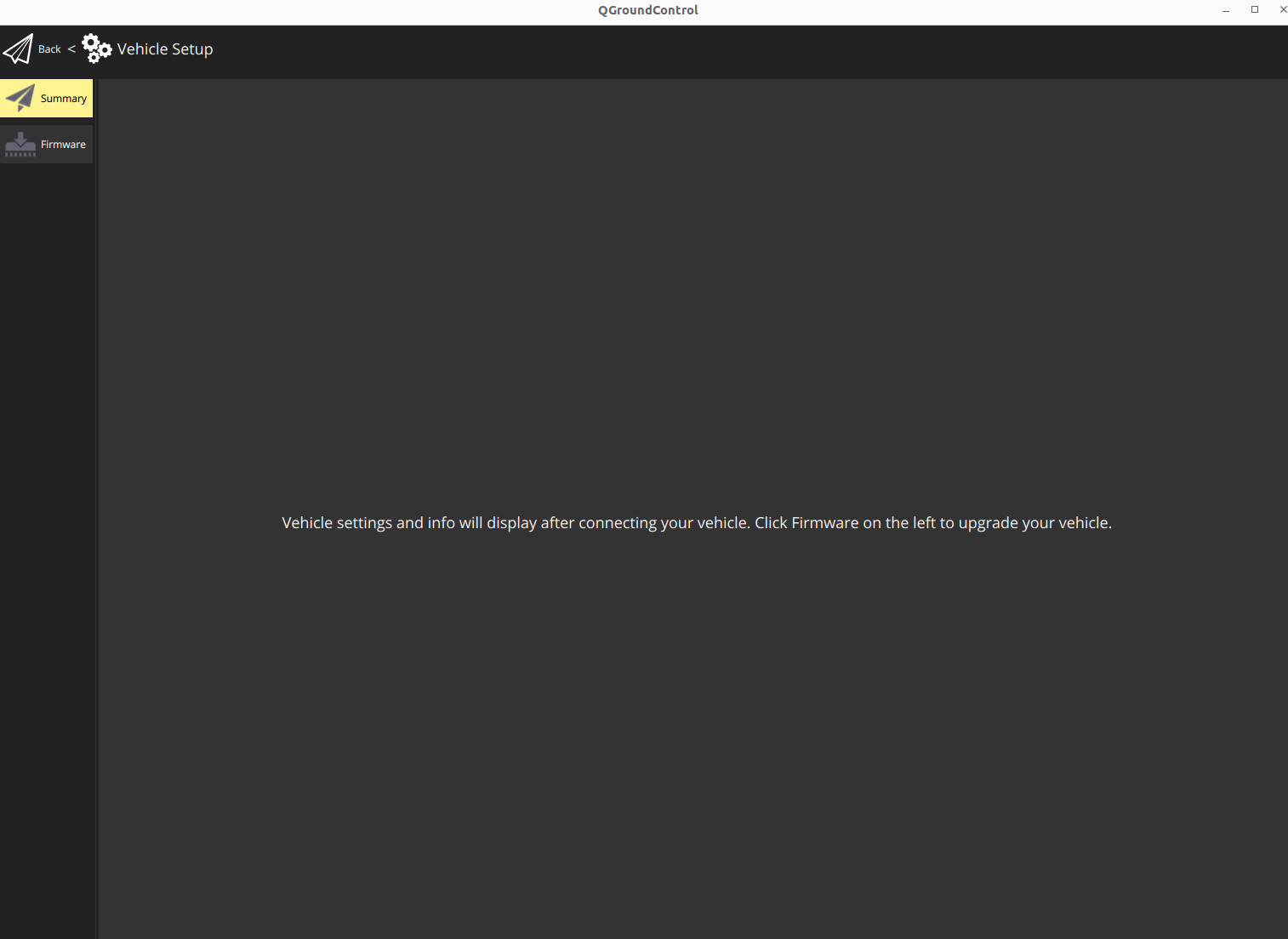
Problem:
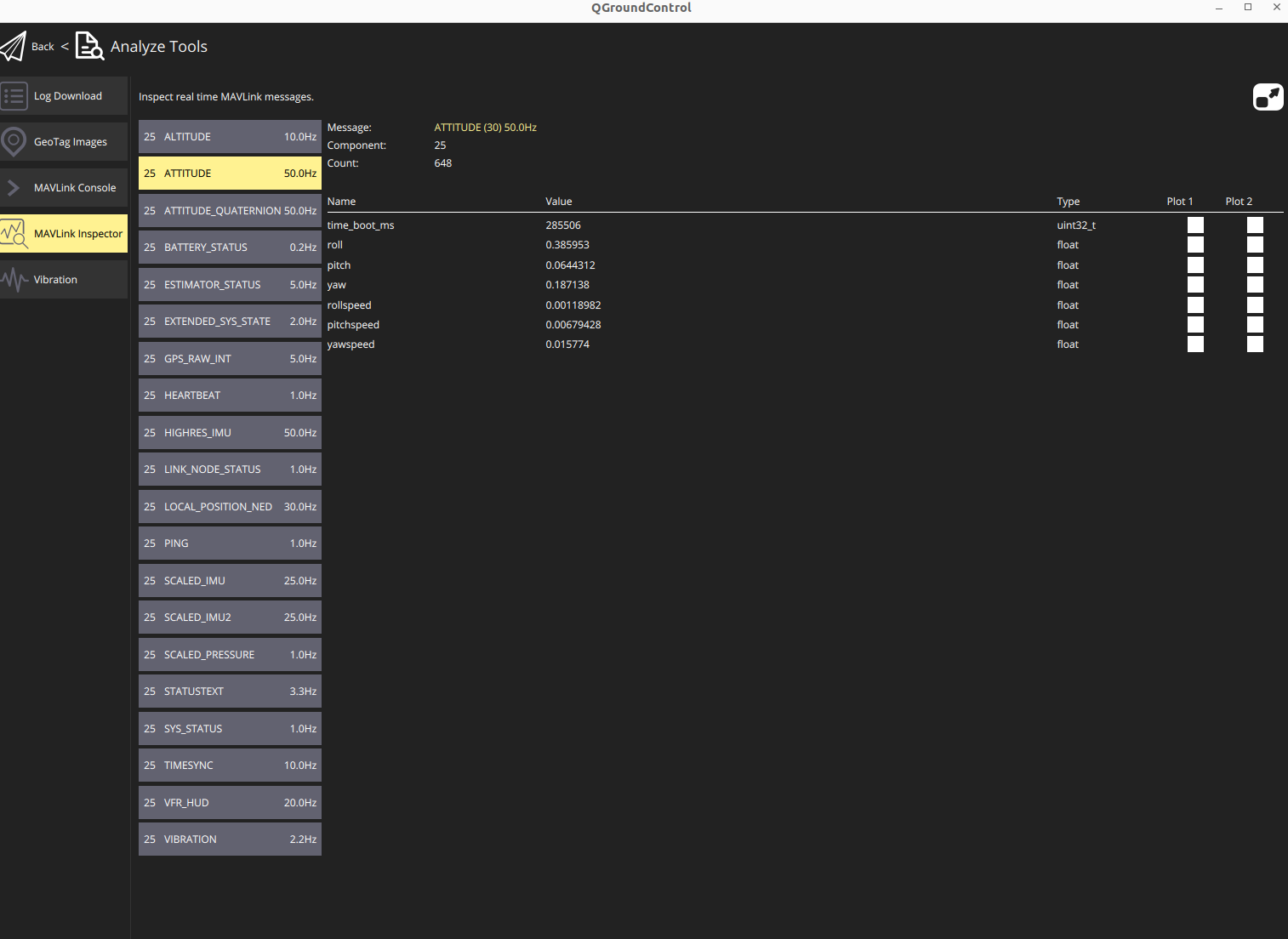
No vehicle setup for device but mavlink inspector can detect messages
-
Device:
-
QGC:
4.30 on Ubuntu 22.04 host.
-
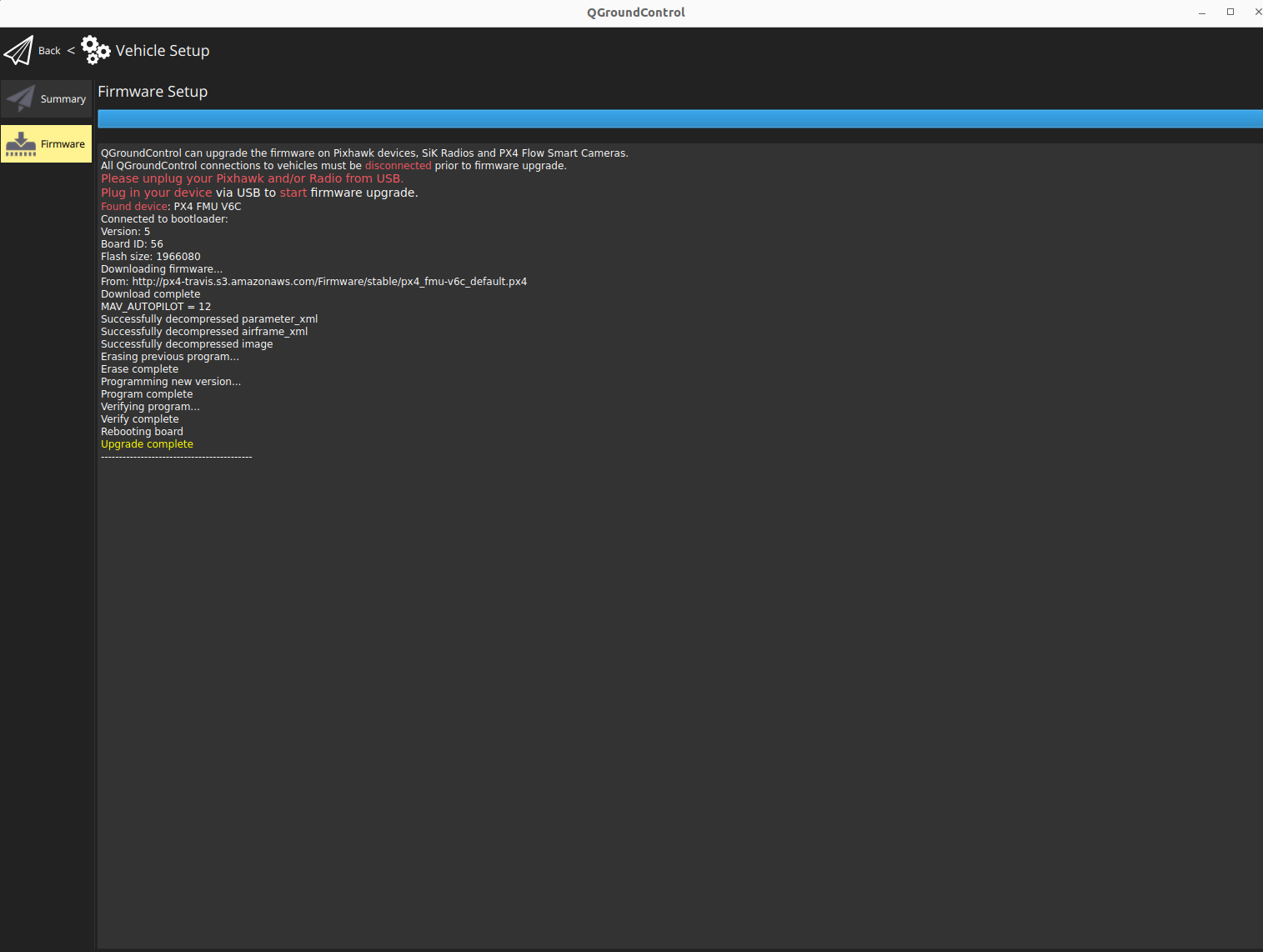
Firmware:
Stable 1.14
-
LinkManagerLog:

LinkManagerLog: Waiting for next autoconnect pass "/dev/ttyACM1"
qt.network.ssl: QSslSocket: cannot call unresolved function SSL_get_peer_certificate
qt.network.ssl: QSslSocket: cannot call unresolved function EVP_PKEY_base_id
"v4.3.0"
LinkManagerLog: New auto-connect port added: "PX4 FMU V6C on ttyACM1 (AutoConnect)" "/dev/ttyACM1"
SerialLinkLog: Create SerialLink portName:baud:flowControl:parity:dataButs:stopBits "/dev/ttyACM1" 115200 0 0 8 1
LinkManagerLog: allocateMavlinkChannel 1
LinkInterfaceLog: _allocateMavlinkChannel 1
SerialLinkLog: CONNECT CALLED
SerialLinkLog: SerialLink: hardwareConnect to "/dev/ttyACM1"
SerialLinkLog: PortName : "ttyACM1" Description : "PX4 FMU v6C.x"
SerialLinkLog: Manufacturer: "Auterion"
SerialLinkLog: Configuring port
SerialLinkLog: Connection SeriaLink: with settings "/dev/ttyACM1" 115200 8 0 1
MAVLinkProtocolLog: Temp log "/tmp/FlightData119452.mavlink"
Any idea what might be the case?
- Tried re-flashing bootloader.
- Ardupilot firmware can work on qGC but not PX4 firmware