The quad can fly Goto mode and Mission mode quite flawlessly.
When I command ‘orbit mode’ from QGC, the quad behaves pretty much the same every time: it first fly a straight line to get onto the planned orbit, and then looks like start orbiting but slowly descend down itself to the ground.
Below is the flight log from one of the test flights. In this flight the quad automatically climb up and return to home after descend from the orbit and almost touching the ground, but I am not quite sure what triggered this return to home fail-safe.
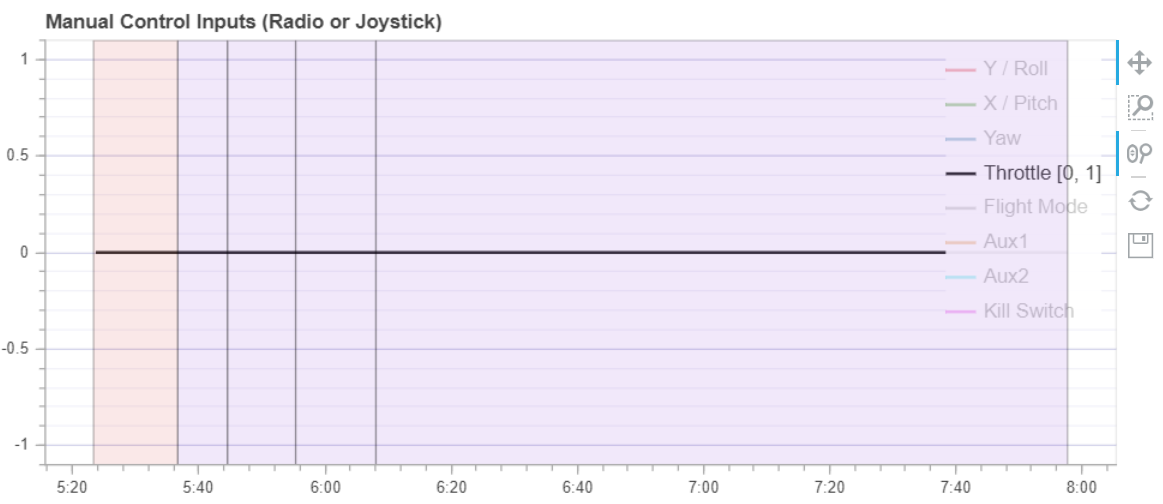
The reason for your drone descending during orbit is that it’s commanded to do so by remote control (RC) signal. You seem to have an RC or Joystick (Could be the virtual Joytick in QGC) connected and it sends 0 (lowest value) on the throttle channel hence the drone thinks you want to descend.
Orbit is a hybrid flight mode that flyes automatically but lets you adjust the circle using your RC sticks, for details about how it works see Redirecting to latest version of document (main).
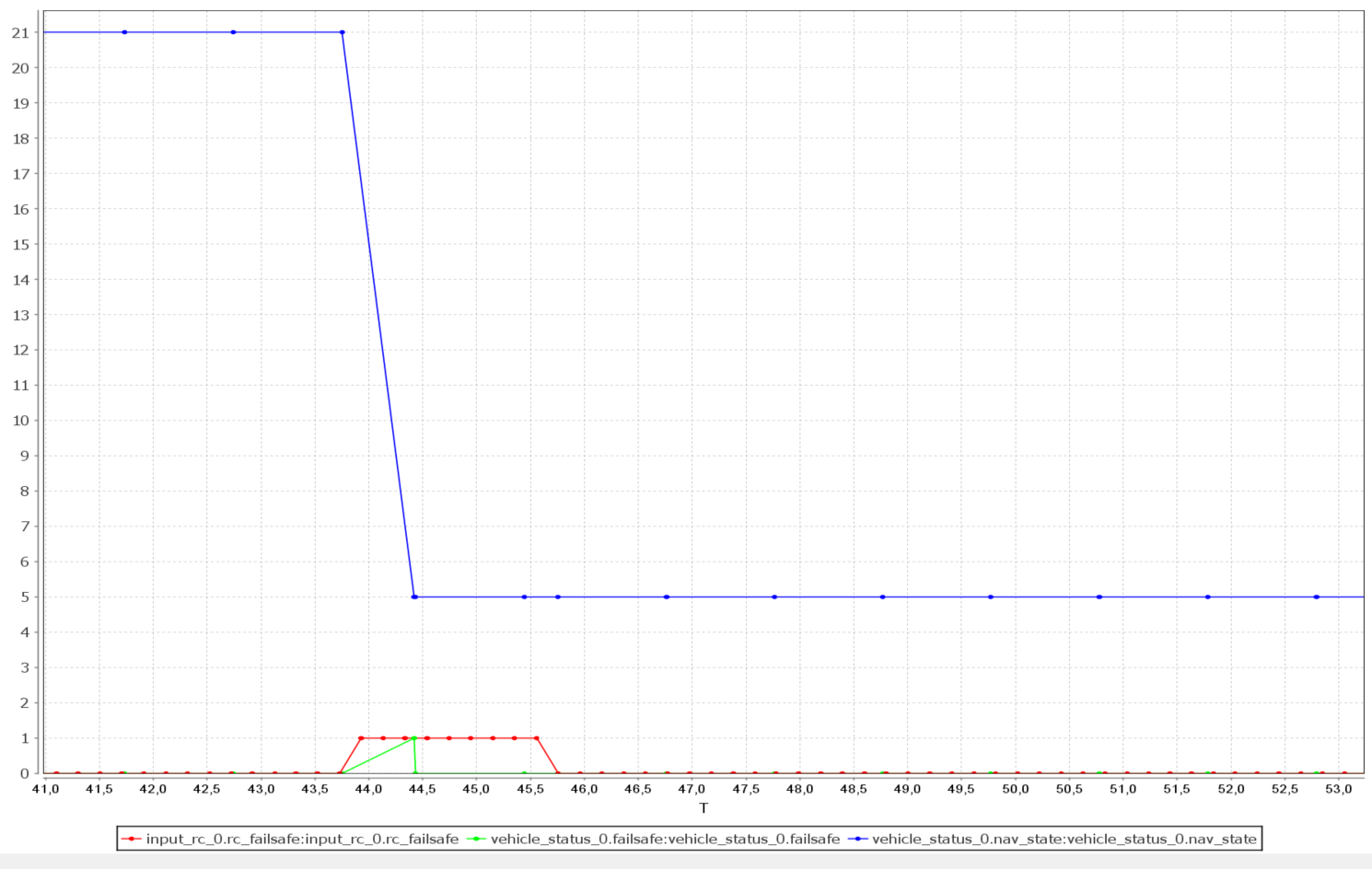
The failsafe that brought your drone into “Return to Launch” mode short RTL was triggered by the same RC or Joystick suddenly being lost for longer than a certain timeout period.
It was then regained but the drone assumes you lost control over the vehicle. If you would have sent it another command like pause, switching to hold or commanding another orbit, it would have executed it again.
So in summary you need to check what your remote or joystick or virtual joystick is doing and maybe disable it if it’s undesired.
I hope this still helped and if you have further questions feel free to post them.