Dear everybody,
I am Fabrizio and I have some issues with offboard control + Optitrack.
This is what I did:
- Uploaded px4fmu-v2_lpe.px4 firmware (ver. 1.6.0 RC1)
- Set ```ATT_EXT_HDG_M`` to value 2 (I didn’t find CBRK_NO_VISION parameter)
- roslaunch px4.launch
- rosrun topic_tools relay /vrpn_client_node/chirottero/pose /mavros/mocap/pose
Mocap seems running… In fact on px4 node I have:
[ INFO] [1485972859.526161408]: FCU: [lpe] mocap position init: 0.19, 1.55, 1.98 m
- I start to send many points (20 Hz) to /mavros/setpoint_positions/local with a custom ros node (following the “offboard example found on dev.px4”)
If I arm and start the offboard phase on Z I have the following result:
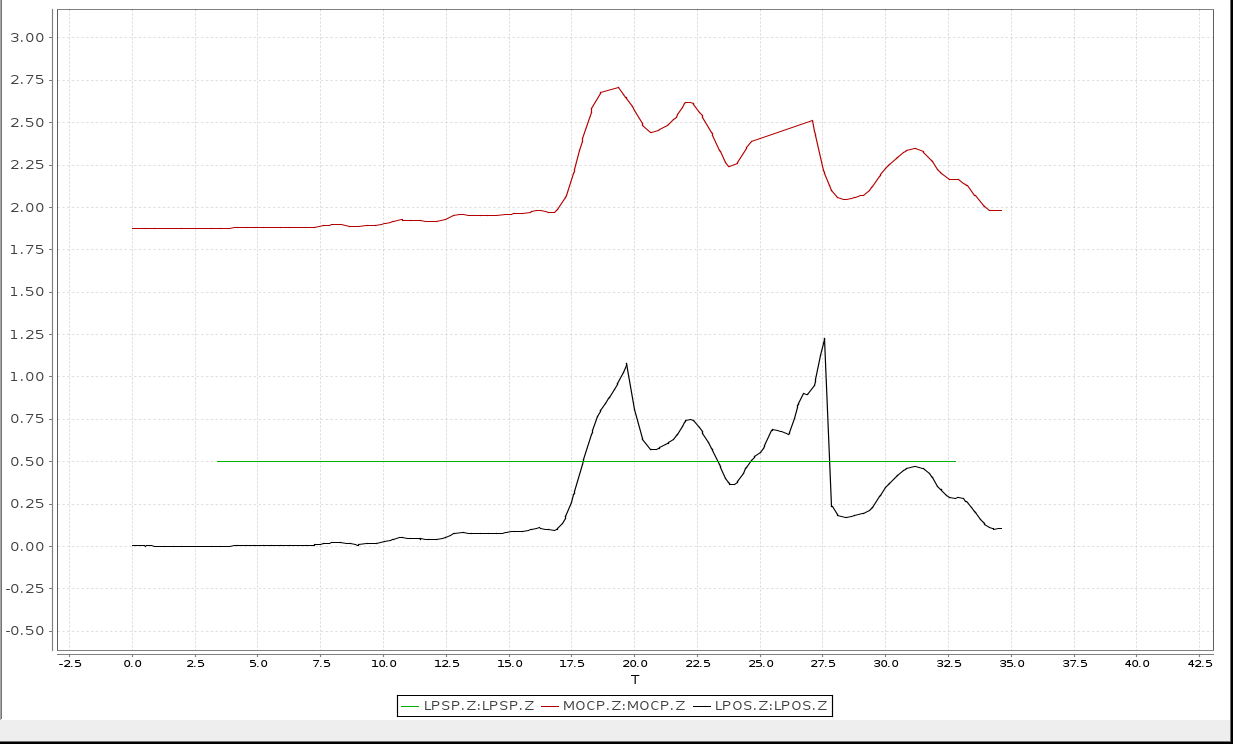
my quadcopter fly away and I don’t know how to understand what’s wrong…
Someone has suggestions?
Thanks!
Fabrizio