Hello,
I am currently working on designing an 8x VTOL craft. I would like to have my fixed wing control surfaces (ailerons, elevator, and rudder) react to Pitch, Roll and Yaw commands given, even while in multicopter mode.
The things that I have tried so far are:
Changing the VT_F_TRANS_DUR parameter to a value of 600.0s (I changed it in the .params file itself)
Changing the VT_F_TR_OL_TM parameter to a value of 600.0s (also changed in the .params file)
I cannot say these have worked because after flipping the transition switch, the MC motors turn off (disarmed to 900RPM) within a few seconds. My understanding was that the MC motors will continue to stay active till the transition time has lapsed.
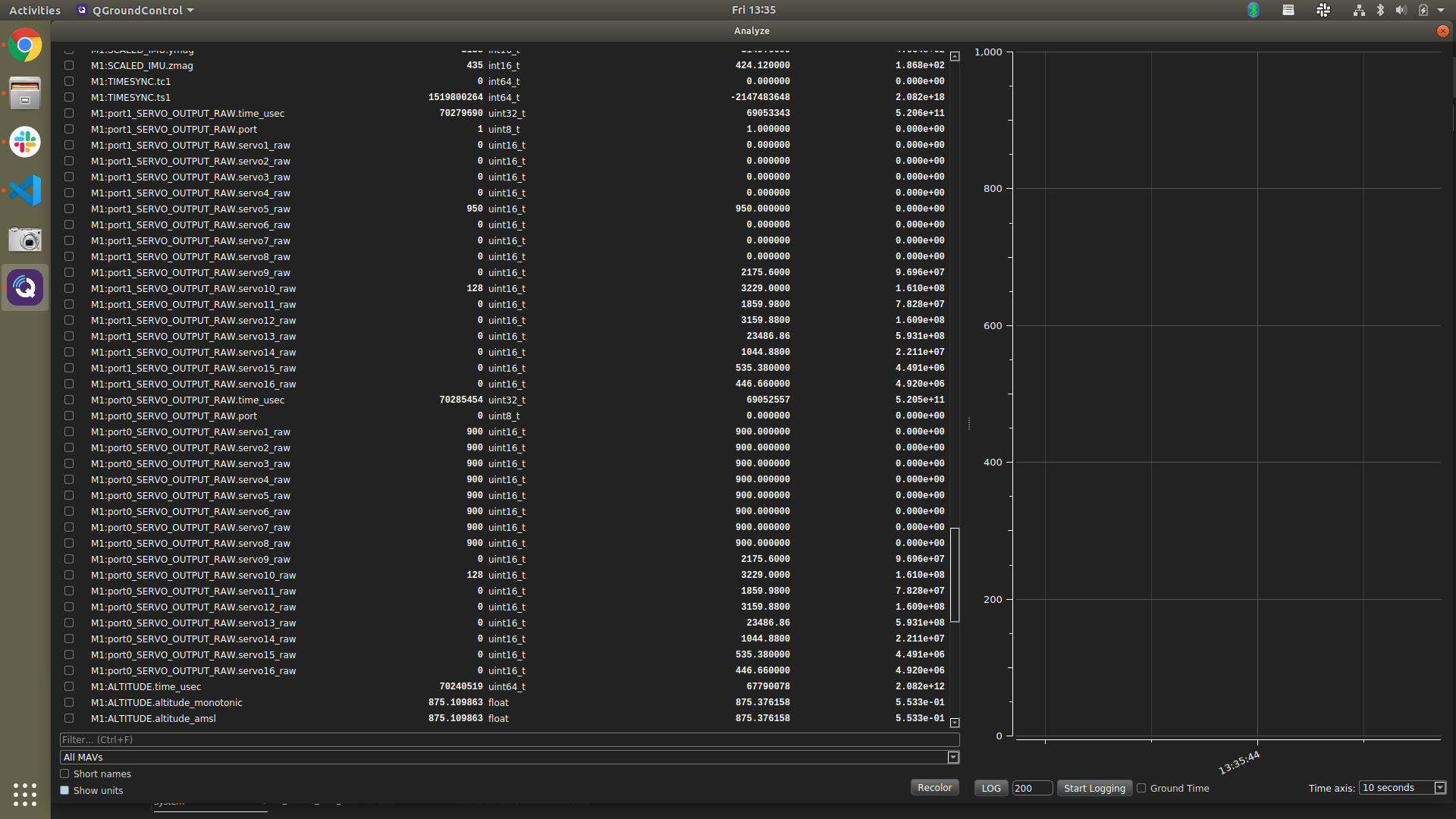
Another question I had was about the SERVO_OUTPUT ports that are visible in the MavLink Inspector. Sometimes I see two ports (port0 and port1) and other times I see only one port. Most often I see only one port. I have attached an image below with both ports. What is the reason behind being unable to view both ports all the time?
To have control actuation on the fixed-wing control surfaces during hover the parameter VT_ELEV_MC_LOCK has to be set to 0. Note that is only applies to the roll axis (ailerons) and pitch (elevator), but not yaw.
Your approach with extending the transition time didn’t work because you would also need to set VT_TRANS_MIN_TM to a high value. Anyway extending the transition time isn’t a great idea, as you can’t give any control input during this time (the controller tries to keep the vehicle level and keep altitude).
Not sure about your other question about the ports, it probably should always show both. Do you maybe have an unsteady connection? (is it over a telemetry module?)
Thank you for the tip with VT_ELEV_MC_LOCK! I noticed the parameter when I started this, but wasn’t sure/hadn’t tested it yet. I just tested it, and it works great!
Okay, since the VT_ELEV_MC_LOCK param gives me control over the ailerons and elevator, I do not need to play with the transition time anymore, so I’ll be reverting those changes! I need control over the aircraft, and if I am unable to achieve that during the transition state, then it is of no use.
It should show both! I can access both using the pwm info -d /dev/pwm_output0 and pwm info -d /dev/pwm_output1 commands in the shell, but they don’t show up in the analyze window. I have checked using the USB connection and the Telemetry module, and observed the same results.