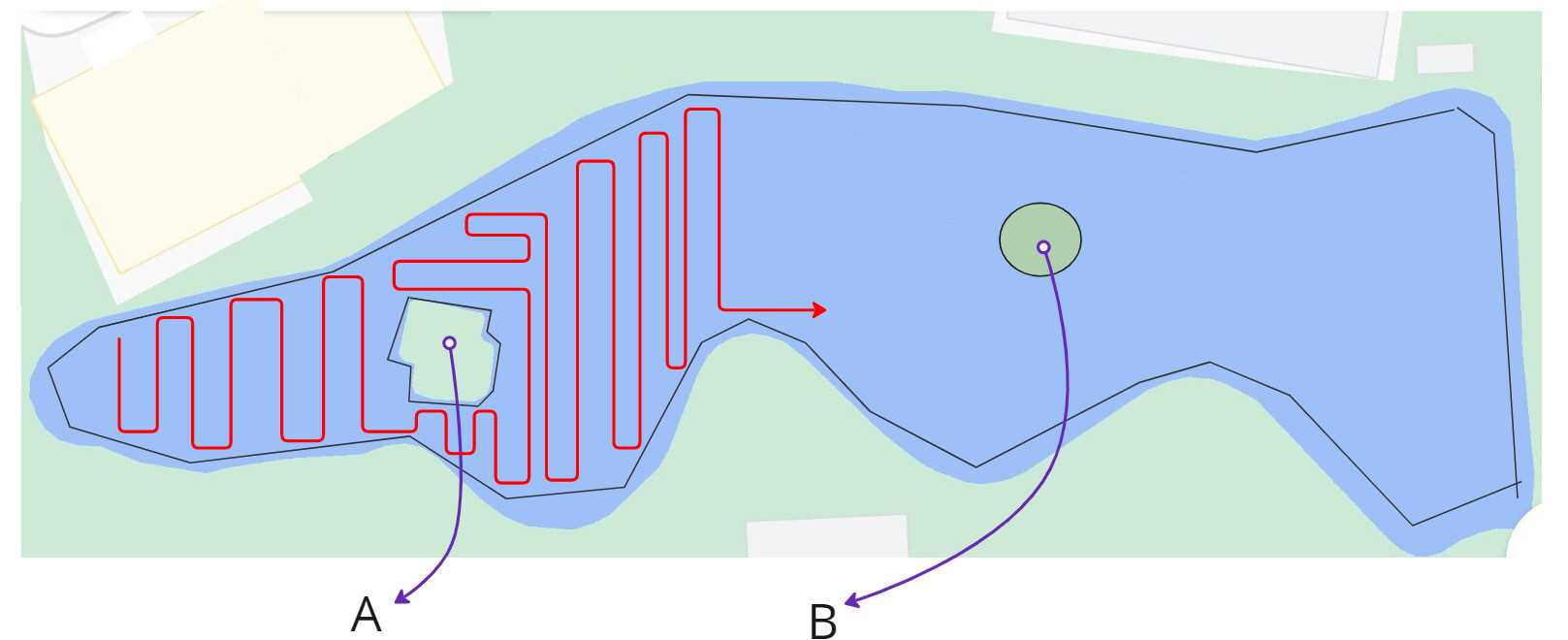
The lake in which i wanted to deploy my rover (boat) has a fountain in the middle. while planning the mission waypoint, the path generated by the QGC goes right though the middle of the exclusion fences that i had made. Is there any way by which i can tell the qgc to plan the path by excluding the fences?