Hi all,
We built a custom stereo camera setup and loaded it on Tarot 650 frame with Pixhawk 4 running 1.13.0 PX4.
We having a hard time calibrating the PIDs.
The camera baseline is about 0.3 [m] and its weight is 1.0 [kg] (the system include Jeston Xavier, external battery, and two cameras)
We reduced the rate gains a lot as you can see in the log, but somehow it still seems to be very unstable with big overshoots.
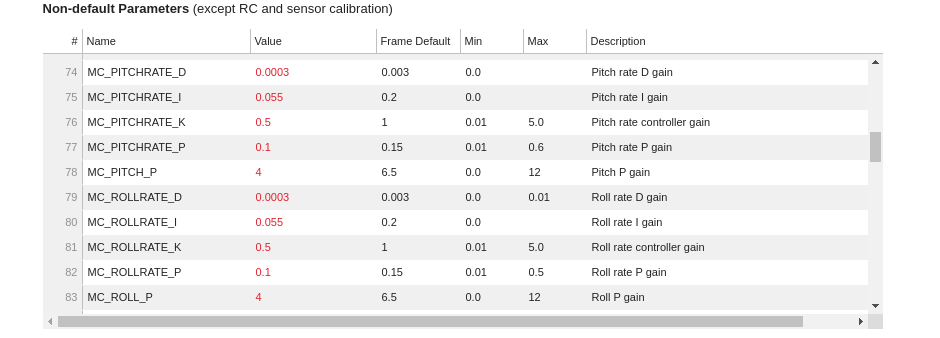


The oscillations seem to happen on a strange axis between the roll and the pitch. the gains of the roll and pitch are symmetrical even though the payload is mounted along the pitch axis.
Perhaps the gains are too low even though the phase in the rates plots seems ok? Maybe the airmode is related to the problem?
We will appreciate any help,
Thanks,
Iftach.