Good day, friends!
One fine day, i want to connect my PixRacer with GPS Here 2, using CAN bus.
I know, what with pixhawk 2.1 this solution is worked.
There is one CAN connector in the board.
After connection, uavcan status said: Node id:125 status: maint.

Then I began to search problem in code.
PixRacer has FMUv4, pixhawk2.1 - FMUv3.
Code for initializing CAN is identical.
I looked with logic analyzer on CAN-outs of PixRacer and outs of HERE,
RixRacer sent requests, but GPS Here sent zeros.
Then I made out HERE, and looked for availability CAN module.
I knew, what GPS HERE 2 rev 1 doesn’t work with CAN bus well, and specially ordered HERE 2 rev 2.
But i faced with obstacle. This is my first module:
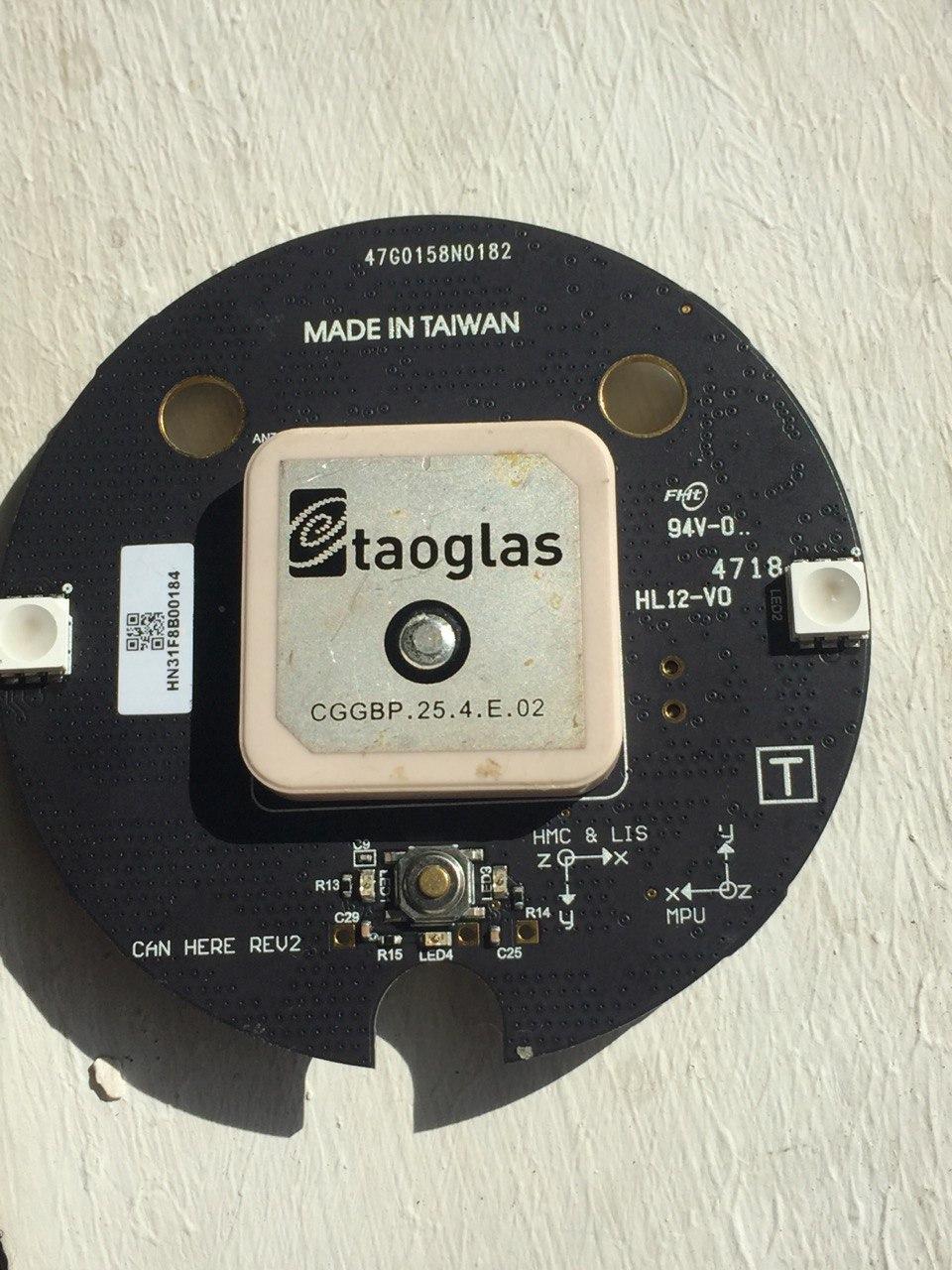
On one side of module is written by white color ‘REV 2’, on another side by engraving - ‘R1’.
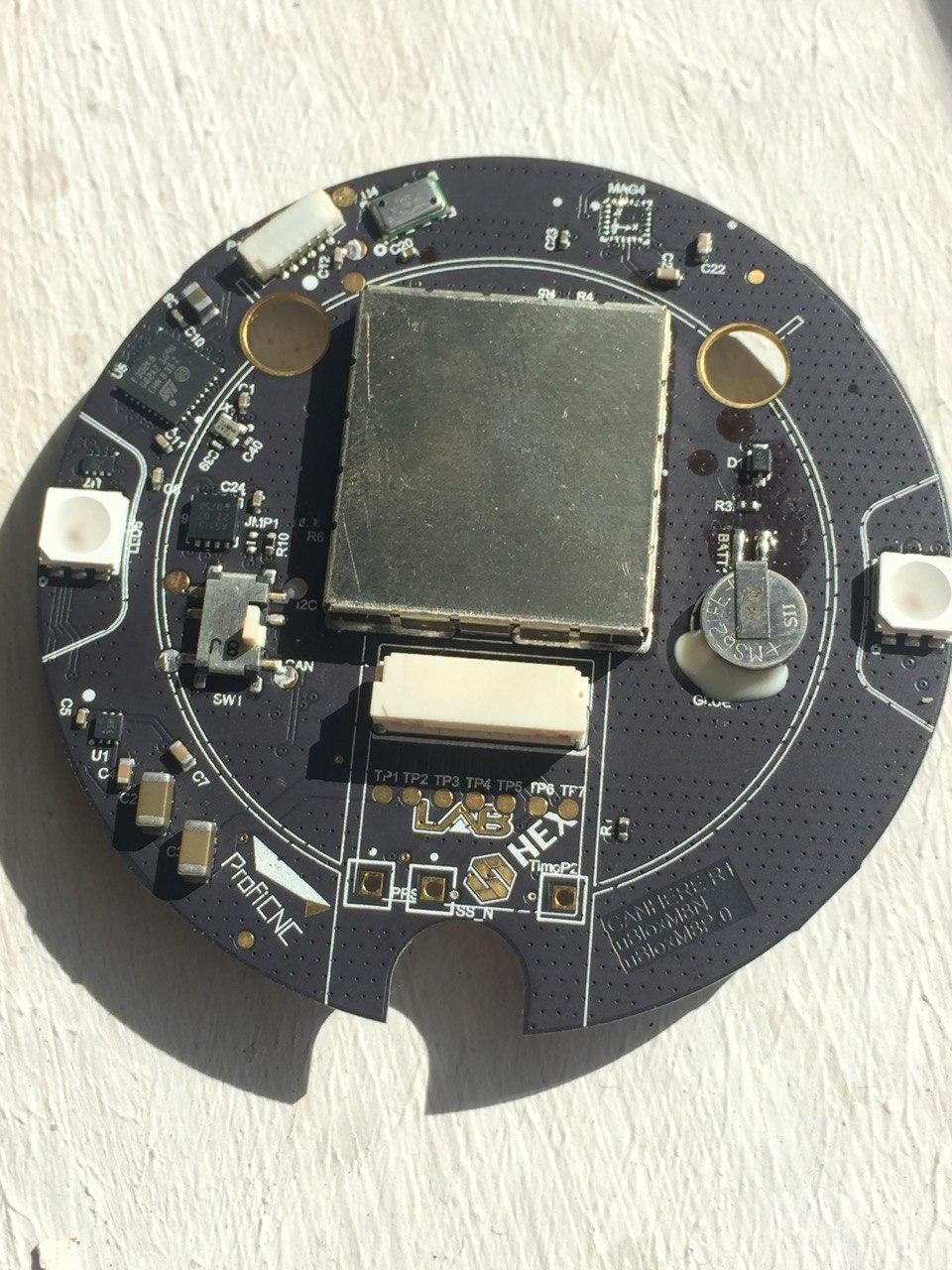
I bought new module of GPS. And made out for turn jumper from i2c to CAN. And what i saw!?

On both sides REV2 is marked! And there is another module YF08E.
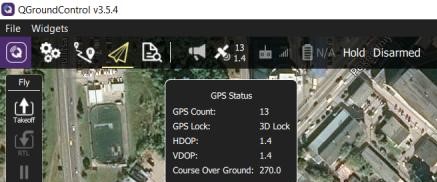
Now this work fine.
Has anyone encountered such a problem related to GPS HERE module revision and CAN compatible?
Good luck everyone!