Hey all,
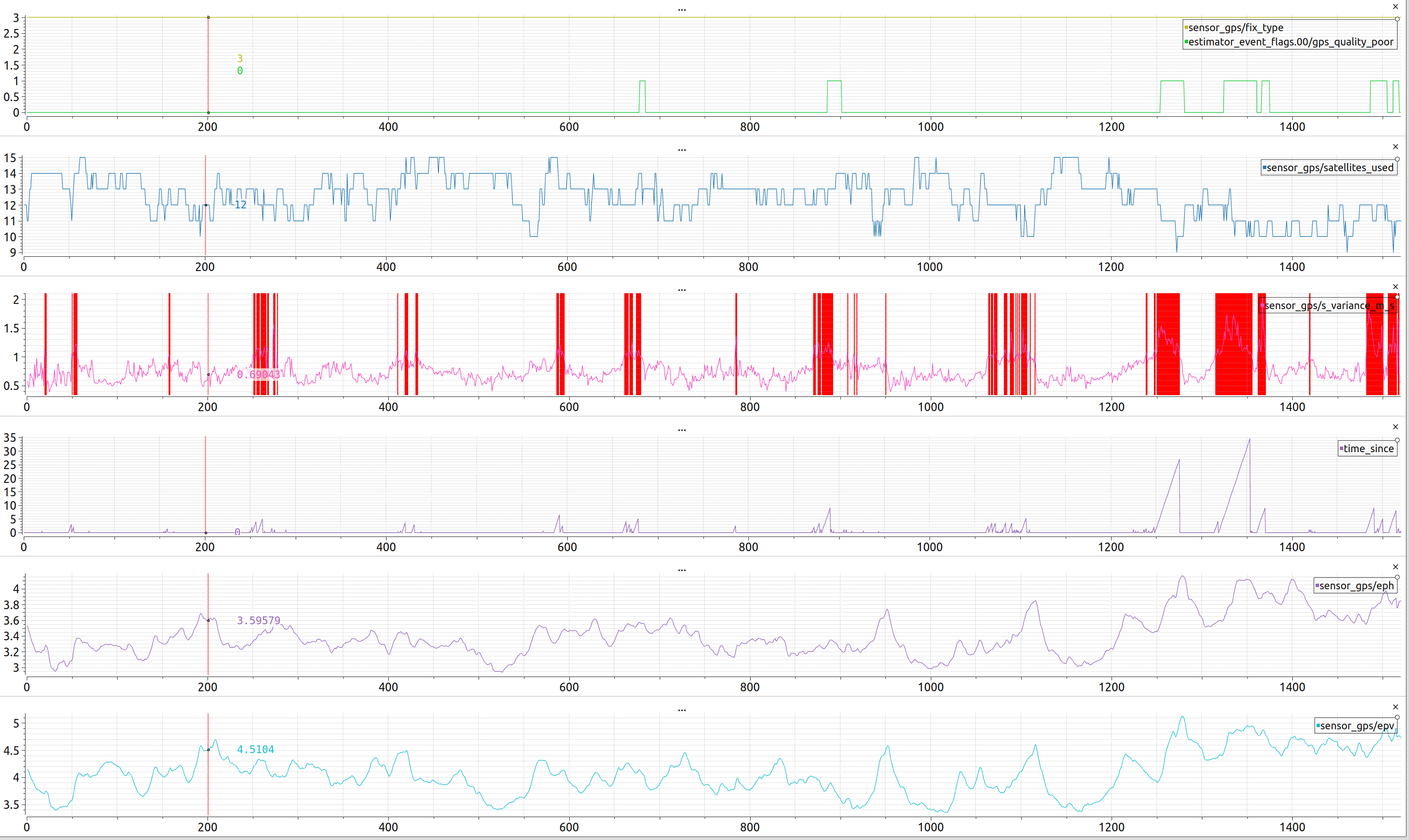
We are looking for help investigating a issue with our vehicle global position which often jumps/rest during flight. We have track the problem down to the s_variance_m_s being out of bound for over 5 sec (see screenshot below). We are trying to understand what impacts the speed variance and what could cause this issue. One weird observation, which may be coincidental or not, is that it seems like the jumps happen in the “orientation” see QGroundControl screenshots.
Our setup is the following:
Flight Controller:
Holybro Pixhawk 6C
GPS:
Holybro DroneCAN M8N GPS
LTE Module:
Sixfab Raspberry Pi 4G/LTE Cellular Modem Kit EG25-G
Telemetry:
RFDesign RFD 900ux
Firmware:
Custom version branched off v1.13.3, no changes w.r.t. GPS, UAVCAN or Estimator
Here is a log a a flight with this problem:
https://review.px4.io/plot_app?log=b65d6d2f-f29d-4005-961c-7aa3f145dc1a