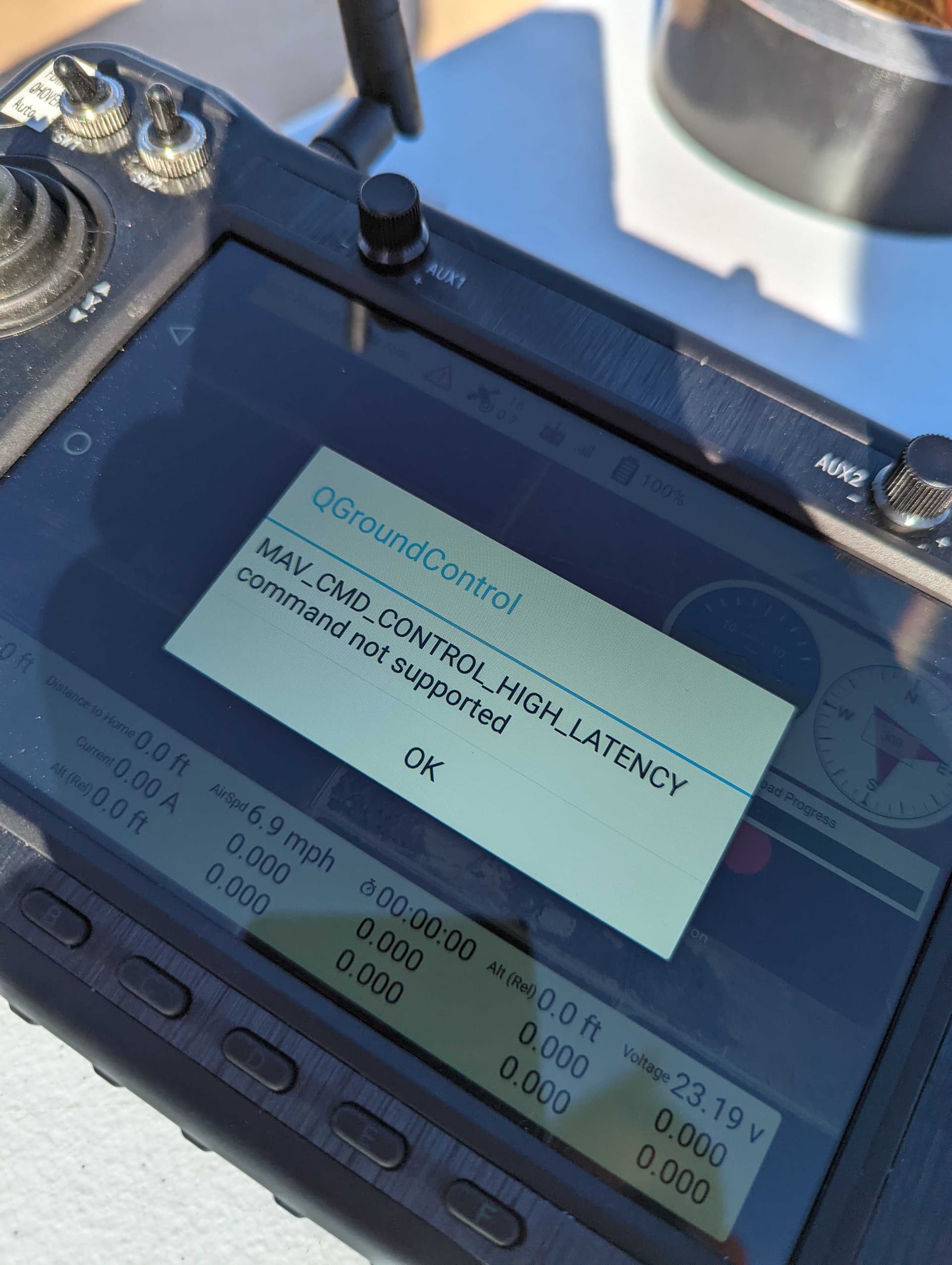
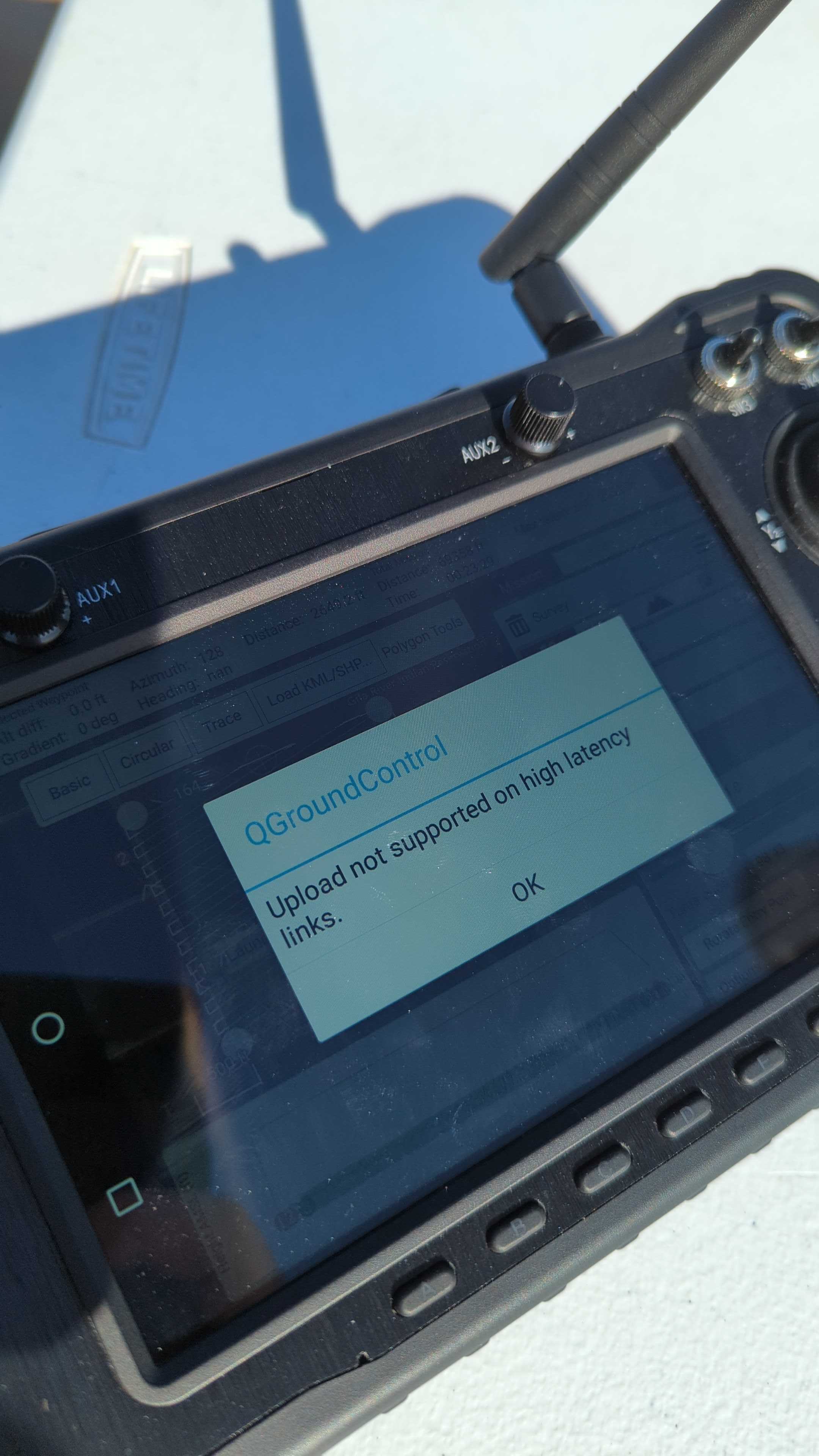
Hello, very new to QGroundControl, but I’m looking to learn more. I was setting up a QuadPlane VTOL and I couldn’t get the parameters to download from the drone to the controller. I keep getting the error MAV_CMD_CONTROL_HIGH_LATENCY command not supported. I can control the drone manually on the ground, it responds to mode changes and the control surfaces move correctly, but I cannot upload flight plans or download the complete parameter list.
I am using a fully integrated remote, the H16 loaded with the most current version of QGC. I’ve reinstalled it a few times with the same results. I installed Mission Planner, and although it was pretty clunky on the H16, I was able to upload mission plans and download the complete parameter list without any errors.
The flight controller is the Orange Cube.
My theory is that the manufacturers did the test flight with Mission planner flying from a laptop, then bound the H16 to the drone afterward and called it a day. How would I go about changing the settings (and what settings should I change) to make it send and receive data over the radio, not a high latency connection like satellite?
Thanks in advance for the help!