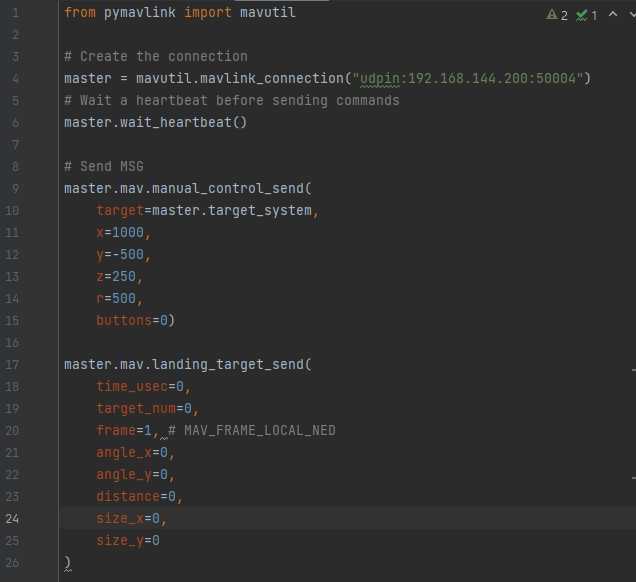
hello. I am practicing how to send mavlink data from computer to pixhawk.
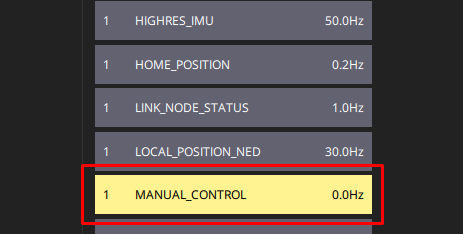
In the screenshot, ‘manual_control_send’ was visible in QGC, but ‘landing_target_send’ was not.
How can I check?
hello. I am practicing how to send mavlink data from computer to pixhawk.
In the screenshot, ‘manual_control_send’ was visible in QGC, but ‘landing_target_send’ was not.
How can I check?
Instead checking the Mavlink console on QGC, you can use recv_match function on your code to check the acceptance status.
Refer to this link for more details. ![]()