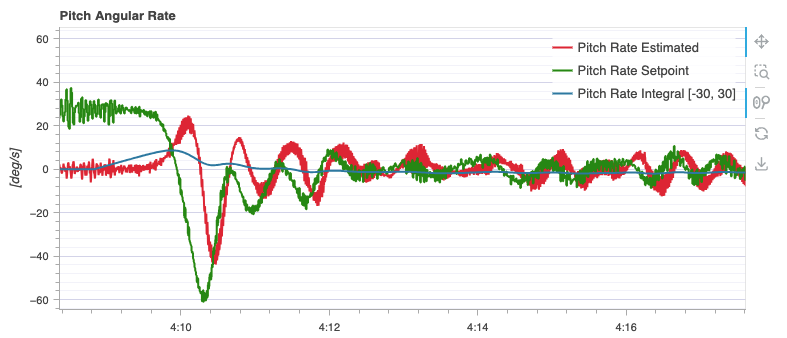
Just did a test flight after setting the IMU_DGYRO_CUTOFF to 15 and 12. There wasn’t much difference as it looks like the higher frequency pitch oscillations are still there but their magnitude was reduced a bit. For some reason there was a low frequency pitch oscillation throughout the whole flight.
I am wondering if this is simply a tuning issue given the size (4.25 kg of my drone). Reading this makes me think I need to change my P and D rate values given the size of my drone. I’ve got both low and high frequency pitch/yaw oscillations and the vehicle does feel a little sluggish. Could it be that the high accel reporting is simply from bad tuning inducing oscillations? Right now I’m using the default rate PID parameters:
MC_PITCHRATE_D = 0.003
MC_PITCHRATE_I = 0.2
MC_PITCHRATE_K = 1
MC_PITCHRATE_P = 0.15
IMU-DGYRO_CUTOFF = 15:
https://review.px4.io/plot_app?log=9b0f2089-bd6f-4e47-82a4-71569abec817
IMU_DGYRO_CUTOFF = 12:
https://review.px4.io/plot_app?log=cbcc6223-2569-4b41-b5ca-32b88faa9f7d
After this I did an autotuning. The resulting parameters were
MC_PITCHRATE_D = 0.003 → 0.0004
MC_PITCHRATE_I = 0.2 → 0.25
MC_PITCHRATE_P = 0.15-> 0.21
MC_ROLLRATE_D = 0.003 → 0.0004
MC_ROLLRATE_I = 0.2 → 0.225
MC_ROLLRATE_P = 0.15-> 0.204
MC_YAWRATE_D = 0 → 0
MC_YAWRATE_I = 0.1 → 0.18
MC_YAWRATE_P = 0.2-> 0.15
The roll and pitch D terms dropped considerably and the P terms increased a little bit. The result test flight with these a parameters is here and still shows significant vibration, although I the vehicle did seem to fly better. https://review.px4.io/plot_app?log=25005f93-d26c-4bd9-b556-76338395feee
Still seeing those oscillations in pitch
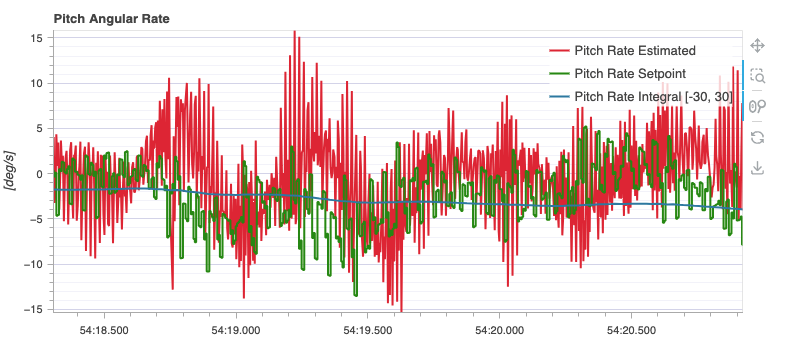
I’m at a bit of a loss as to the source of these high vibes.