Opterra 1.2m with Holybro Pixhawk Mini on Wing Wing Z-84 Airframe.
Upgraded to v1.10.0 Stable from v1.8.1 (82aa24ad) Stable.
Upgraded to FrSKY RX6R receiver with Jumper T16 with XJT External Module.
Generic Pixhawk power module v1.0 Log1 and Log2
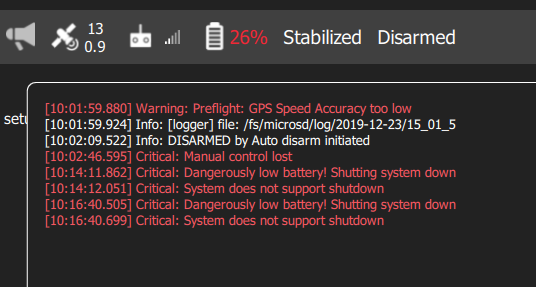
While setting up and testing on the bench, I keep getting the following errors preventing me to arm and test the settings and throttle response. These issues didn’t exist in the previous firmware.
I have done every power calibration but still getting a low avionics warning (4.8v). I’ve had to disable CBRK_SUPPLY_CHK to ignore it.
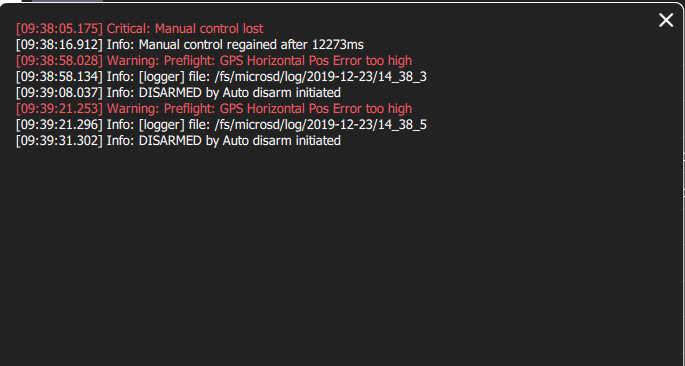
It keeps doing “DISARMED by Auto disarm initiated” even though COM_DISARM_LAND = -1
“GPS Speed Accuracy too low” or “GPS Horizontal Pos Error too high” even though it’s got 13 sats locked and 0.9 HDOP?. I have the same settings in it. Do I have to do all the Sensors calibration again?
Means that the reported speed standard deviation is too high. (You can find it in the log vehicle_gps_status.s_variance_m_s)
Means that the reported “eph” is too high (you can find it in the log, vehicle_gps_status.eph)
Unfortunately this doesn’t guarantee that the gps data is good, it tells you that the geometry of the constellation can provide a good horizontal accuracy. If the GNSS receiver is jammed, the resulting accuracy can still be bad.
Hopefully, yes, you’re not supposed to get good GPS data indoor (I’m already surprised that your receiver can see 13 sats). However, it’s not guaranteed: an electronic device like a companion computer or a camera too close to the receiver can jam the GPS signal.
Just go outside and you’ll see