Hi, I am trying to fly a drone in hold flight mode, but changing the flight mode from the RC QGC gives me the following error.

I saw that in the MAVLink inspector it should appear as a sent message, however it does not appear either, I have an idea that the EKF2 parameters must be configured, however I am not clear how to subscribe the topic to send the information.

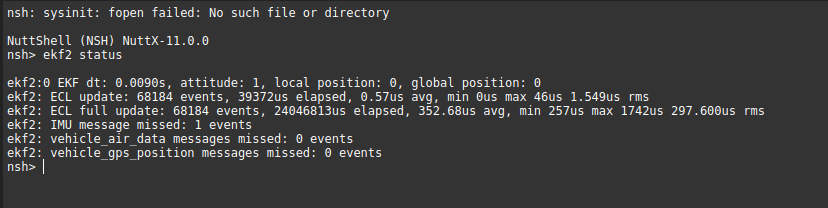
The EKF2 statu return 0 on global position and local position
and doesn’t start

The GPS I use is a MATEKSYS AP Periph GNSS, M10-L4-3100 GPS Module connected through the CAN port of the controller.