Hello all.
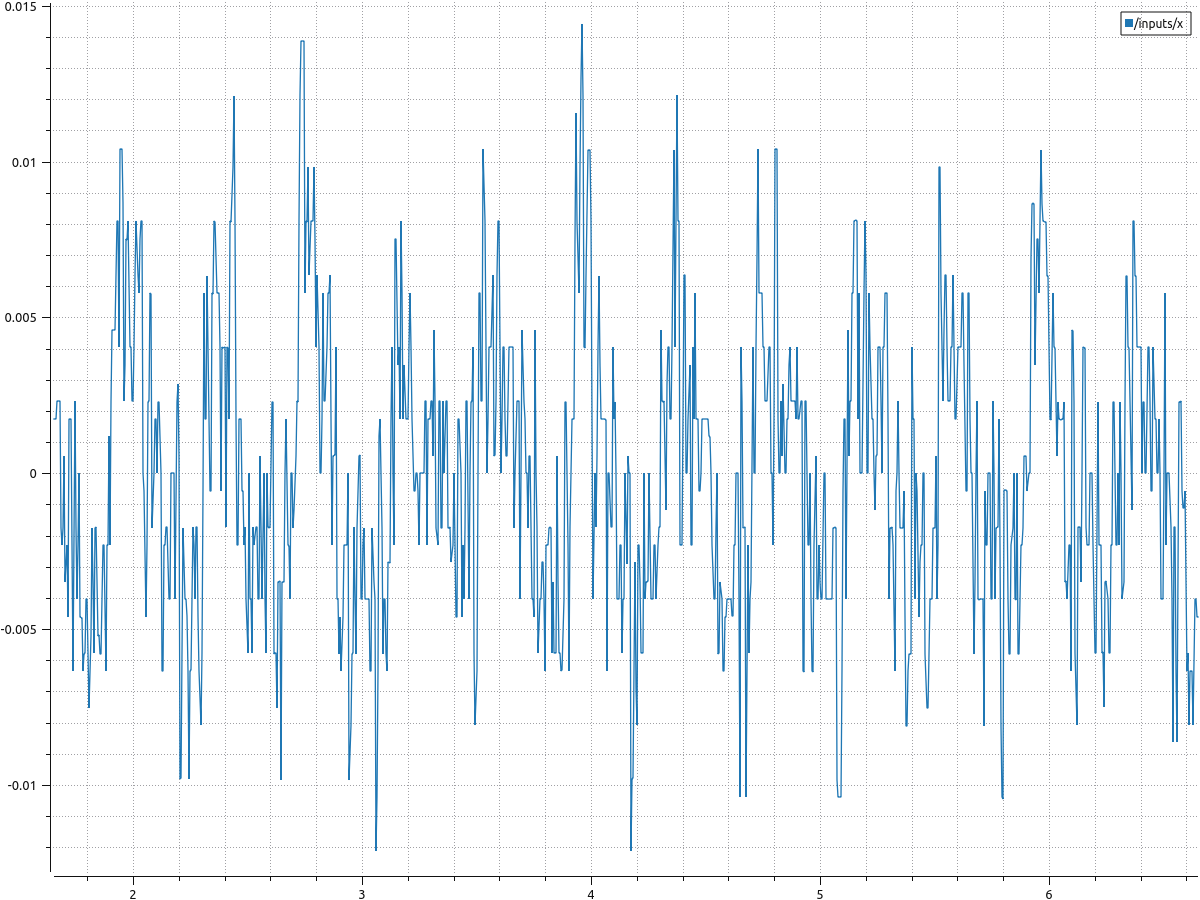
I am trying to estimate the inertia of my drone using the EKF algorithm, in which the torque is the input, and the angular velocity is the measurement. The algorism is passed in the ideal condition but failed in the px4 sitl simulation. I checked all possible factors, and found that it’s the noisy torque which caused the algorithm to diverge. I have tried several filtering methods, but these doesn’t work well.