I would like to implement a bi-copter which I can control manually via an RC and autonomously. I was considering building from scratch but the PixHawk 4 mini seams to include all the hardware needed.
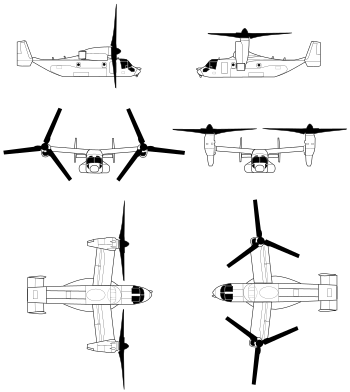
The bi-copter shall be similar to a a V-22 Osprey configuartion.
Is the configuration of a bi-copter supported? As from manuals and videos, the closest I could get to was VTOL but not sure it fits the purpose.
Is it possible to write the control syntax by accessing data from accelerometers, gyros, camera and height sensor, just like I would write to an Arduino?
Similarity in terms of having two rotors mounted on either side of the fuselage and a holirizontal stabilizer. Most likely the props will not have any form variable pitch for the time being.
The motors will be tilted using servo motors
I did some initial research and did not find much as to what coding the controller involves. Is there a document I can refer to?
I have finalised the idea to go for the V22 tilt rotor design without variable pitch.
I want to control altitude and automate hovering and auto-land the aircraft as well as enjoy flying it by an RC remote.
Hi @Michael_Zerafa , If by “variable pitch” you mean that the two propellers are just standard quadrotor propellers and not “helicopter”-like propeller (no swash plate). Then I think you cannot do that without a third rotor. You simply don’t have enough control inputs to stabilize the system.
And even if it is possible (see Building a V22 Osprey - Part 1 - YouTube but be advise, the is a very peculiar mechanical solution on the propellers), it would be a nightmare from the control perspective.
Hello Benja, I am planning to build a bicopter drone with just two rotors on a fixed rigid frame. The rotors are having tilt mechanism which is controlled by servos. I couldn’t find relevant firmware built for this setup. Could u recommend which firmware should i use for this and could u please share the link for the same if available.
Please do reply and thank you for your time.
Hello @Michael_Zerafa Even i am planning to build a bicopter but not the one similar to V22 tilt rotor type, but the one similar to quadcopter but only with 2 propellers that are tilted over servos. If u have finished building yours, can i get some sugestions on how you configured the firmware on pixhawk and how did u get it stabilized. Can i get any documentation that i could refer on. @Benja Hope you could put on some suggestions as well. Please do reply…
Thank you in advance…
The project is still ongoing. I did not use PixHawk for the scope of my studies. I have developed the code from scratch using arduino. The key of issue was the COG. As rotors tilt, you would be facing a shifting COG. I am using the batteries as shifting ballast to keep the COG between rotors. There was the Gemini project which is worth looking into. PixHawk was used if not mistaken.
Is it possible to build a customized firmware using pixhawk?? I hope its possible but couldnt find out how to do it. Do u have any idea on this, and any documentation that u referred to build the bicopter code?? Please put on some suggestions. Would be a great help to me.
Thank for your valuable time.
I am working now on something similar, but at the same time completly different. I am trying to understand the pixhawk code. Its…different from ardupilot .
I guess the secret is somewhere in the …Vehicleeffectivness… files…will be some work to understand the structure. Ardupilot was easy. Code commenting is a hit but seems not pixhawk style.