Hi,
I would like to know if it would be possible to create a new tricopter without defining a geometry (Firmware/src/lib/mixer/MultirotorMixer/geometries). I tried to do it using summing mixers, but when I use the new airframe, I got two problems:
1- Motors rotates before arming the drone (very dangerous).
2- Motors idle speed is very fast (using an oscilloscope, PWM is almost 1500us while PWM_MIN is set at 1075us).
PWM idle of the front motors:
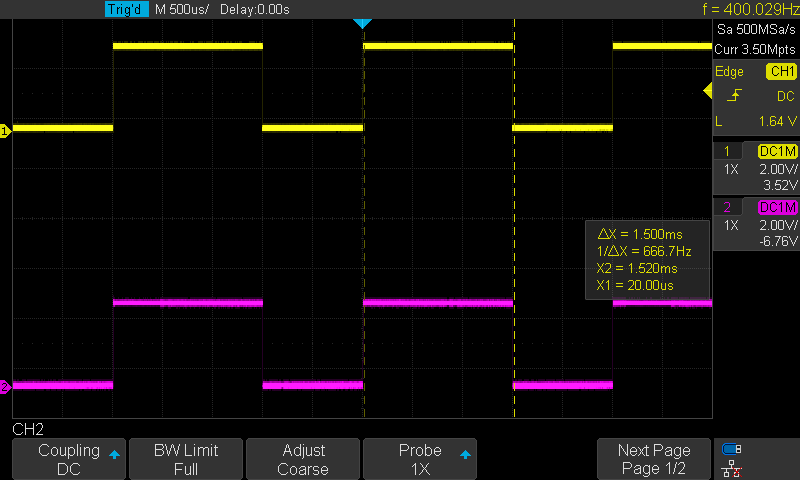
Any help will be appreciated!