Hi,every one!
I found the plane go to rotary wing land mode when vtol plane lost rc singnal.
Meanwhile all elevon,aileron and rudder will suddenly shudder to it’s limit.
After short period of time,those go back to its middle point.
Any one encounter this?
Can you share the flight log and we’ll take a look?
hi,dagar!
The log file is attached.
My aux mix file as followed:
#####################################
M: 1
O: 10000 10000 0 -10000 10000
S: 1 4 10000 10000 -10000 -10000 10000
roll
M: 1
O: 10000 10000 0 -10000 10000
S: 1 0 10000 10000 0 -10000 10000
pitch
M: 1
O: 10000 10000 0 -10000 10000
S: 1 1 10000 10000 0 -10000 10000
throttle
M: 1
O: 10000 10000 0 -10000 10000
S: 1 2 10000 10000 0 -10000 10000
yaw
M: 1
O: 10000 10000 0 -10000 10000
S: 1 3 10000 10000 0 -10000 10000
########################################
My main mix file as followed:
#######################################
R: 4x 10000 10000 10000 0
#######################################
I don’t know why rudder suddenly shake when vtol plane lost radio signal.
I read this log, and found it enter multirotor land mode.
But as code description,it’s rudder should be back to middle point.
These code as followed:
if (!_attc->is_fixed_wing_requested())
{
_mc_roll_weight = 1.0;
_mc_yaw_weight = 1.0;
_vtol_mode = ROTARY_WING;
_vtol_schedule.flight_mode = MC_MODE;
if (_rear_motors != ENABLED)
{
set_rear_motor_state(ENABLED);
}
Because the forum don’t support .px4log file,I change the log file type description.
So you must modify .pdf to .px4log when you want read log data with flightplot.
Thanks for you!
I don’t see any attachment, but it’s better to post it to logmuncher and share the link. It gives a nice overview and still lets others download the full log. http://logs.uaventure.com/
Sorry,I use the upload function of the web forum.
And it note that the log file was uploded,But finally I can’t find the file.
Please refer the address: http://logs.uaventure.com/view/JEX9QEMwru3u9ditd8vMp6
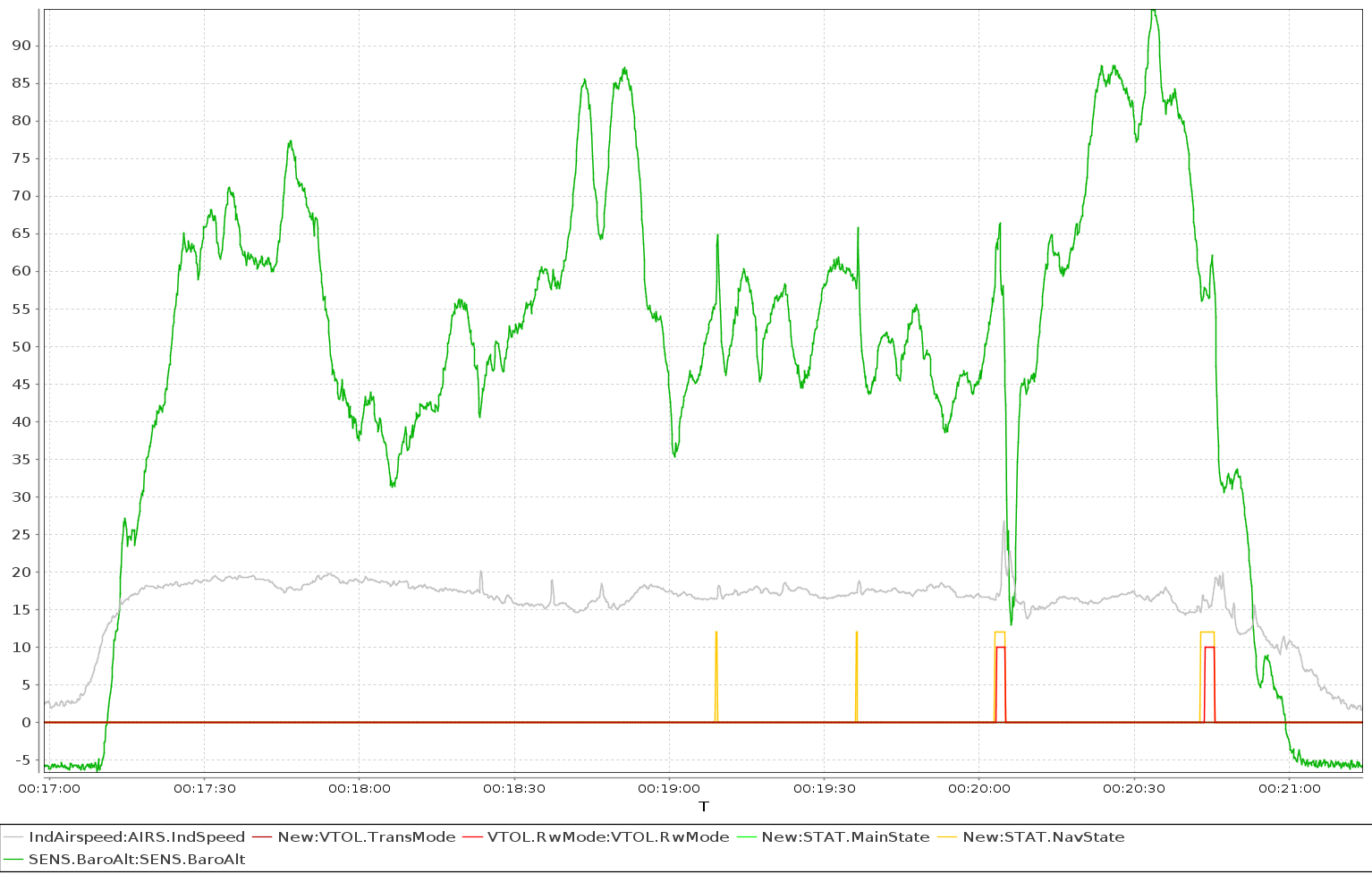
The vtol plane with this log file worked in manual fix wing mode.
You can refer all mixer pwm output ,radio input and rc lost singal.
It looks like you were primarily in manual mode, but then briefly flipped into DESCEND. This is because you didn’t have valid GPS.
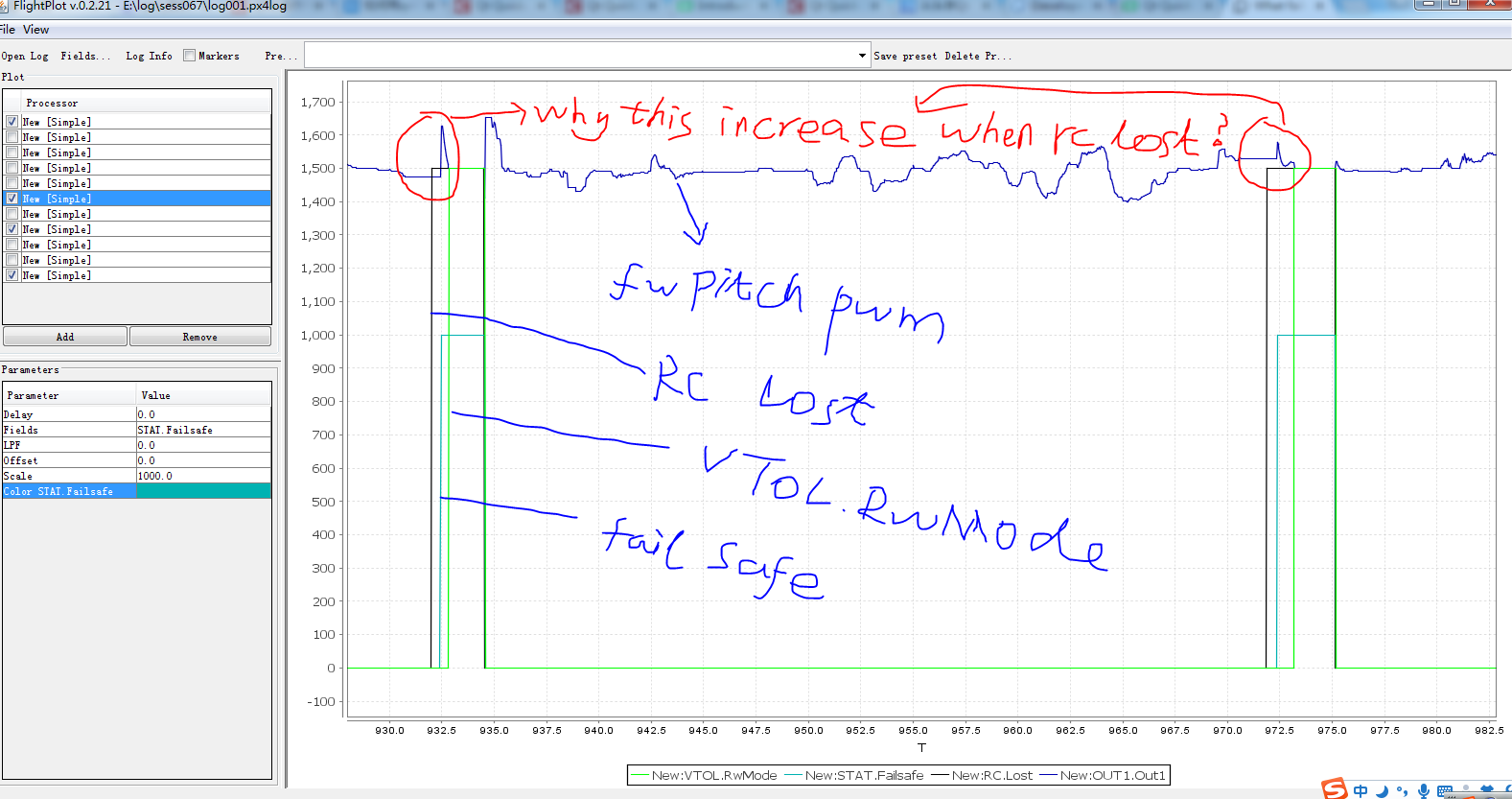
Hi,I know why it go to land mode.
The problem is that the pwm output channel is outputing uncorrectly when it go to quadmotor land mode.
In the log you were only in MC mode at the beginning. Can you describe the timeline?
Hi,dagar!
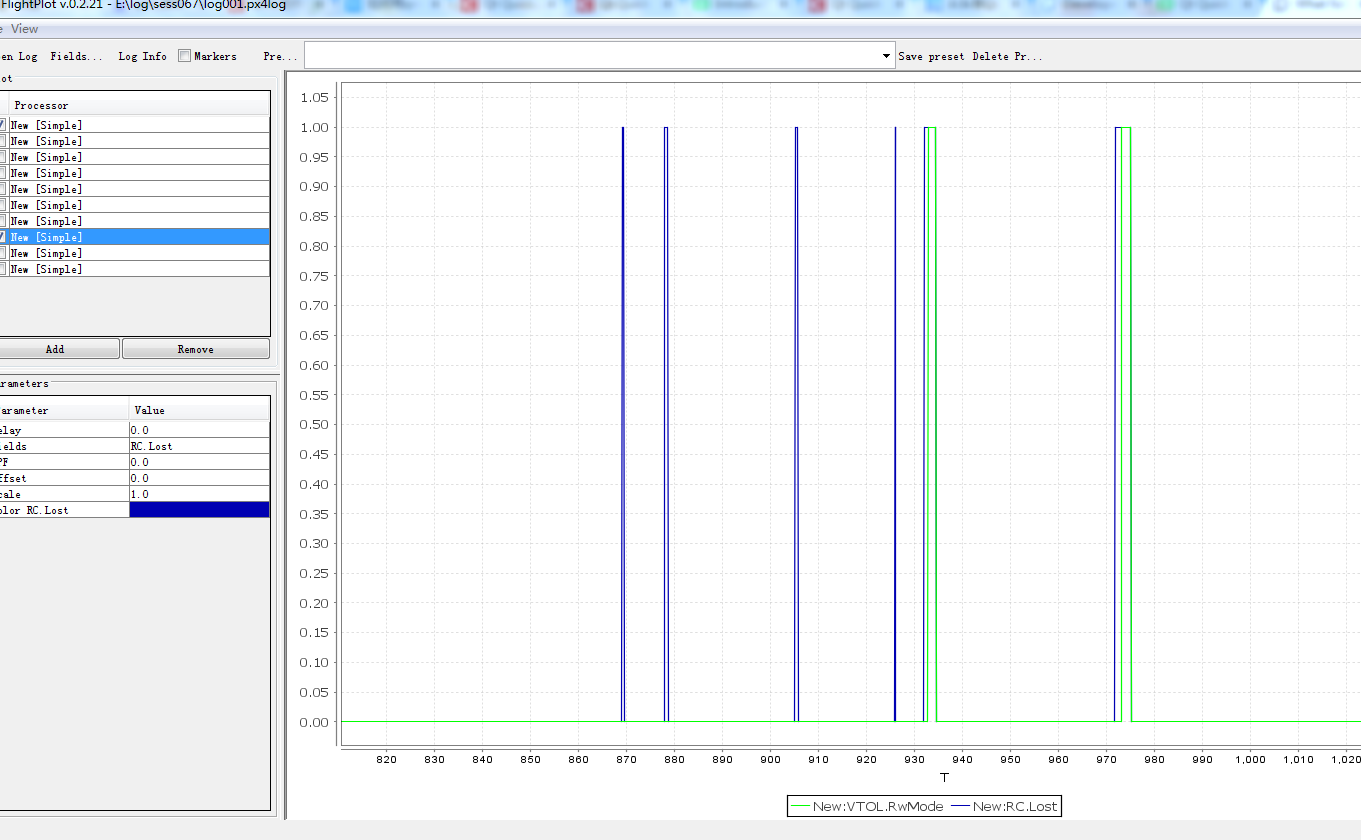
You can see the rc.lost and VTOL.RwMode signal.
As the log file described,when rc singal lost,the plane go to mc mode.
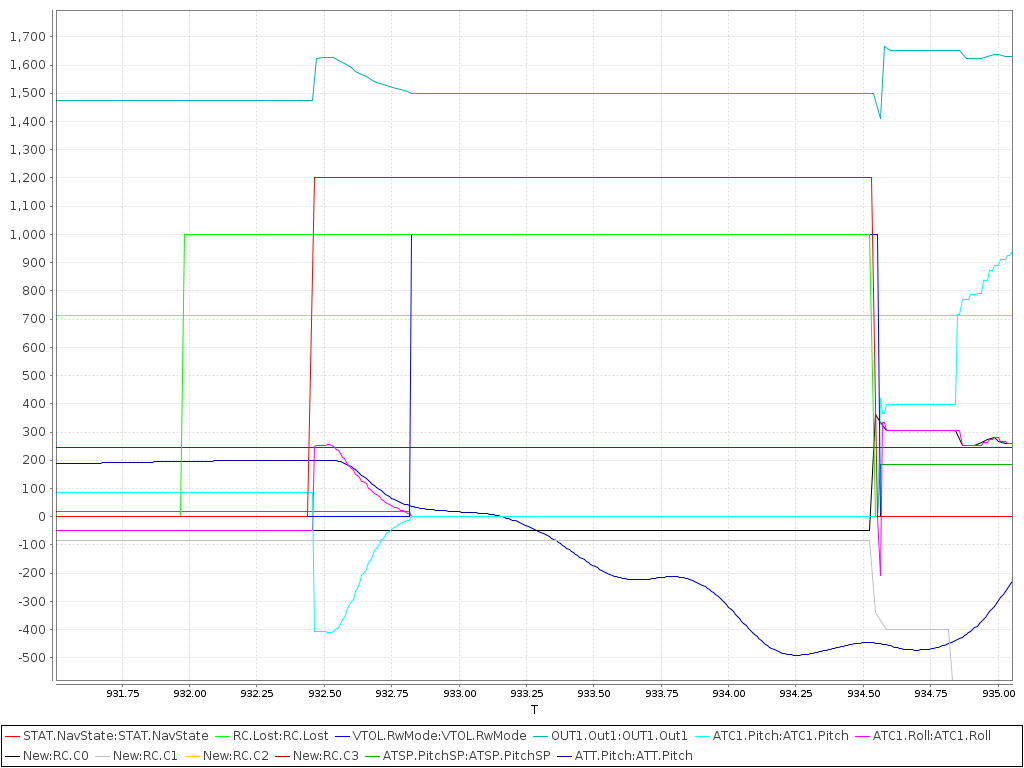
Thanks for pointing out the specific area of the problem. During the brief period of RC loss the vehicle switches into DESCEND mode (AUTO LAND), but is initially still a FW.
hi,dagar.
when rc lost,the vehicle switches into DESCEND mode but it’s still a fw.
Can I consider it is in fw DESCEND mode,and this the reason of fallacious pwm output.
Yes, it’s just normal FW descend (briefly) and not fallacious. I’d have to take another look when I’m back at my computer, but I believe you didn’t have GPS, so it’s likely doing an open loop loiter.
Hi,dagar!
I didn’t installed GPS on my vtol plane.
But in FW manual mode,may I think it’s action is a bug?
I’m not sure if nav state DESCEND (LAND MODE) without GPS is quite correct, but either way there would be some servo movement. What would you expect it to do with RC lost and no GPS?
hi,dagar!
I use futuba telecontroller.
It’s default settings is keeping last effective pwm channel value when signal lost.
I expect it keep last effective pwm channel value with RC lost and no GPS.