I’m currently at your log file, thanks!
If you are only using the Pixracer mag you might not be able to get decent performance. The interferences in the center of the frame are typically significant and you want the GPS including a mag to be on a mast for good performance.
The velocity is set by VEL CRUISE. Max is just the upper limit. I have not seen another report on the safety switch and can’t reproduce. I’ve updated the param meta data to clearly state that the Geofence option is “Return to Land” and I’ve removed the flight termination option from the drop-down since its a pro feature.
Everything seems good from my testing outside of issues already noted
Noticed two things (dry Tests Indoor):
-
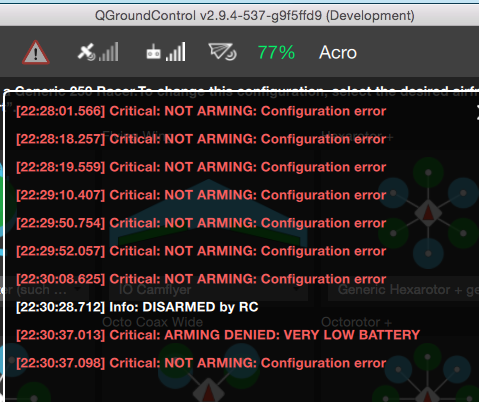
When Powering up via USB and attaching the Battery later it will always deny to Arm with Very Low Battery Alert even if Battery is full.
-
I could arm and fly when having no GPS Signal (0 Sat with GPS attached - Basement = no Signal for uBlox 6M) while having GPS Circuit Breaker disabled.
F450 with Pixracer RC14 latest BETA Build.
@Andreas_Hoffmann None of that seems wrong. If you don’t boot with battery the voltage measurement results will undefined. And flying manual without GPS is always supported.
@LorenzMeier
i found an issue. I am setting up a new airframe a flying wing and modifying Phantom wing pitch PIDs in attitude control. Every time I power cycle the gains revert back to originl gains of the phantom wing. If i just power cycle the plane and leave QGC open it does not matter what values I enter the plane does not use them. I have to restart QGC and enter new PIDs every time I power cycle the plane. I didnt have this issue on thursday. I am changing PIDs over 915 mhz radio.
sys_autoconfig is set to 0 and same with restart type
@LorenzMeier Does this mean that even if no GPS Signal is present I can always arm? I agree that flying without GPS (connected) should be supported, but then the Circuit Breaker has to be set. I thought this would prevent arming when a GPS Module present but no Lock aquired. If this is not the case I would suggest implementing an option where arming without 3D Lock would be denied. To make the comparison with DJI, it is clearly visible if Home Point Set and GPS Lock aquired by the Status LED.
You stated the GPS circuit breaker was disabled, so that would mean you can arm without GPS. I have the GPS circuit breaker set to 0 and I cannot arm in my basement.
@LorenzMeier
Another issue is if I want select a different airframe I have to apply the new frame multiple times before it takes effect.
@LorenzMeier
Actually it continually reverts back to all previous setting and airframe on restart, so we cannot Shane airframes or parameters.
@LorenzMeier
I fixed the issue I was having at least temporarily. Here’s what I had to do.
- Uninstall daily build QGC and install 2.9.4 stable
- Flash stable px4 firmware
- Flash new airframe to reset all settings
- Install daily build of QGC
- Confirm all setting have changed then flash px4 beta firmware from beta build of QGC
- Load my parameters and restart
- It’s asking me to recalibrate all of my sensors but the sensor icon is not red.
Everything seems to be working again now after that procedure.
No this meant, that I could arm regardless of the GPS Circuit Breaker settings. As to my understanding a disabled Circuit Breaker (in my reading Disabled => Setting <> the Magic Number) would fire a Problem, Error, etc for the specific area, like it would not be possible to Arm when there is a GPS Module but no GPS Lock. Despite the Description of the Breaker reads that there would only be an Error if the GPS Module was not found.
@LorenzMeier Tried to fly again just a few moments ago… same behaviour. It would fly nicely but then starts to get wild and I hat to Kill it again. I do not think this has to do with Compas or GPS. This Time I switched back to Stabilized and still I could barely control it. I’ll send you the Link to the Logs.
I got the following Messages from the SD Card (I waited for a GPS Lock, confirmed by the Beeper - still the Log does not carry the Date & Time):
2000_01_01_00_00_05: GPS fix lost 2000_01_01_00_00_24: GPS fix regained 2000_01_01_00_00_24: [inav] GPS signal found 2000_01_01_00_00_25: [inav] init ref: xx.1264731, x.2852731, 466.5750 2000_01_01_00_00_45: ARMED by RC 2000_01_01_00_00_46: [blackbox] /fs/microsd/log/sess060 2000_01_01_00_00_46: [blackbox] recording: log001.px4log 2000_01_01_00_00_50: TAKEOFF DETECTED 2000_01_01_00_01_33: LOW BATTERY, RETURN TO LAND ADVISED 2000_01_01_00_01_40: CRITICAL BATTERY, LANDING AT CURRENT POSITION 2000_01_01_00_01_43: MANUAL KILL SWITCH ENGAGED 2000_01_01_00_01_57: LANDING DETECTED 2000_01_01_00_02_00: MANUAL KILL SWITCH ENGAGED 2000_01_01_00_02_01: [blackbox] stopped (0 drops)
Observe the following from Logmuncher… I could not see the Voltage drop below 15V (4S) Battery did not charge more than ⅓C afterwards:
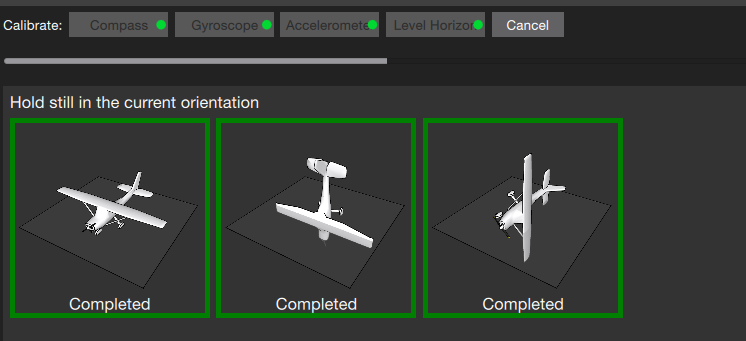
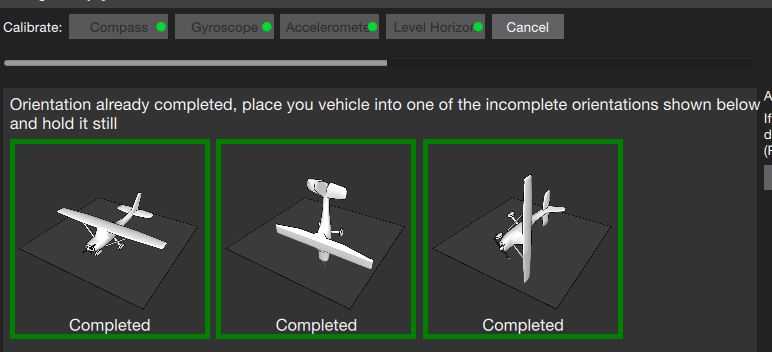
ACC calibration seams to be bugy. It still want to calibrate other axes then shown in the pictures.
calibration on osx 10.10.5 with usb and latest qgc build and master
i’m just discovering the newst daily build and there is a lot of new stuff! What is that? how do I use it?
btw. the airspeed sensor is stil showing in copter calibrations
this has already been reported…
You can assign an RC Channel as Tuning channel and assign this to a Parameter in the Parameter List i.e. Attitude Tuning. To assign it to a Parameter in the List click the “Advanced” Checkbox after selecting a Parameter.
That is awsome! I will test it asap and give my feedback here 
I’m strugling with an other problem now. I was hovering to do some acro tests, and then it would not arme again. My battery is fully charged but I get a low battery message. How is this possible?