Hi All,
Has anyone used this https://github.com/dronecrew/ulog_tools for computing multicopter gains? I tried using it for a small 10" quad rotor with what seemed to be good results. For a much larger frame (~35" span) I get results that are too twitchy.
Anyone have some advice? Are there some parameters I can adjust in the LQR synthesis?
This was the first flight using roughly default gains:
https://logs.px4.io/plot_app?log=5829e4ff-ccf3-4704-865d-234826ebd8b1
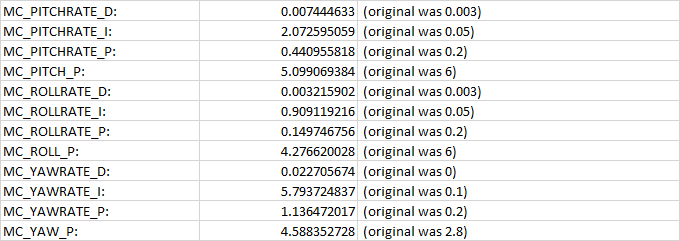
And the flight with LQR gains:
https://logs.px4.io/plot_app?log=f83a8ebe-fce4-425b-8093-482c2df61371
When using nearly default gains, the quad would get growing oscillations hovering almost still. It seems as though the roll/pitch rate P terms were too high. Any thoughts on how to improve the stability? I don’t really care about how responsive the system is, I only care about stability.
Thanks!