I got this issue when i was testing HIL on Ubuntu.
I followed the steps on this website: https://pixhawk.org/dev/hil/jmavsim .
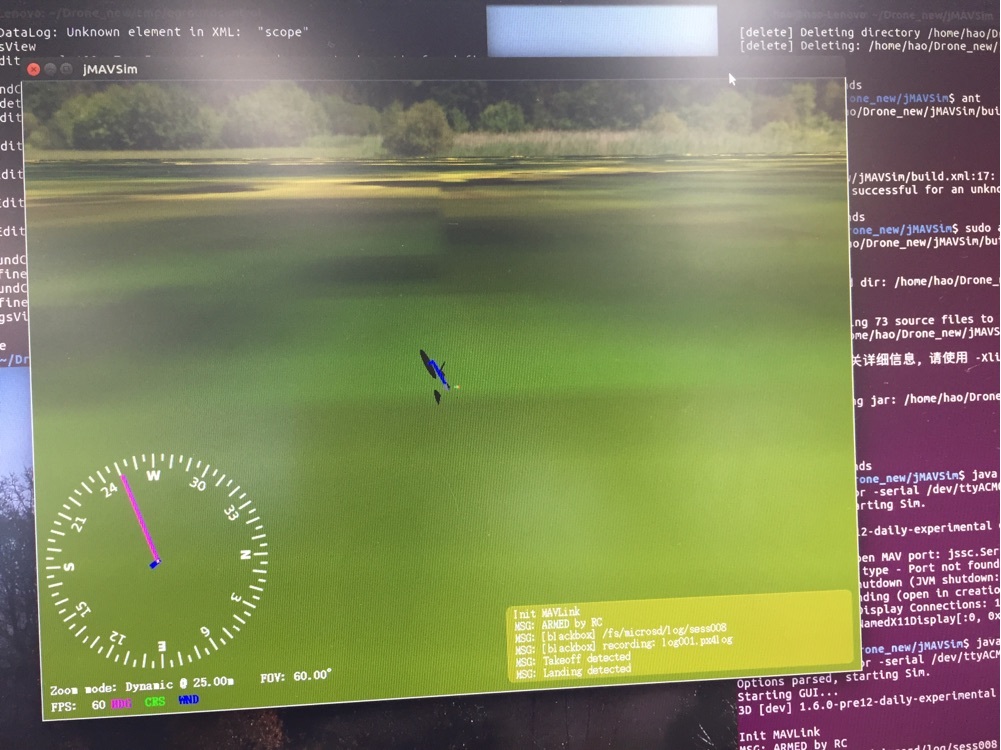
I thought the copter would take off smoothly.
But unfortunately, the copter rolled unexpectedly after it took off.
Worse, it seemed to be out of control by radio.
Does anyone know how to solve it? Please help me.