Dear friends, I use small 210 cm quadcopter and try to setup EKF2 for stable GPS ublox M8N flight.
When copter takes off manually in Stabilize mode - it starts slowly rotate to the left, and Estimator watchdog indicates Yaw Check bit, here’s logs:
https://logs.px4.io/plot_app?log=5a0e377d-b0b2-465e-982a-733da7d162a9
https://logs.px4.io/plot_app?log=d16e82b2-071d-49eb-b83b-49808bfe42e3
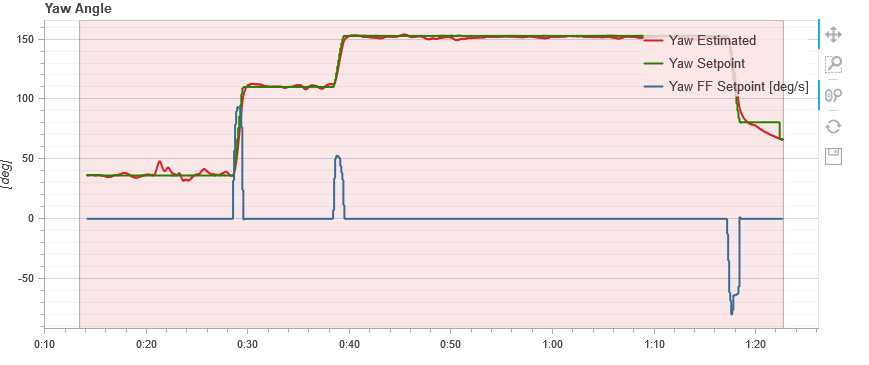
On Yaw Angle plot it looks like I turn the copter manually to 150 degrees - but actually I just returned it back to straight (0 degrees) position after yaw angle slowly moved to the left during Stabilized flight:
I tried my best to tune parameters according to this documentation - Redirecting to latest version of document (master) - nothing helped.
The only way I succeed to get rid of Yaw Check bit in Estimator Wachdog - is to turn off both mag sensors: CAL_MAG0_EN, CAL_MAG1_EN = disabled. Here is log:
https://logs.px4.io/plot_app?log=bda8ada2-77cc-44d4-91ca-5a4ecb8fdafe
Yaw wachdog = 0, but copter stabilizes very poorly, this setup is not sutable for autonomous GPS flight.
Please help me to tune EKF2 estimator to approximate compass data properly, to get rid of this Yaw estimation error.