Hello everyone
I am trying to send attitude setpoints through offboard mode.
I am using ROS2 and RTPS which is from the example.
It sends the command success but i found the timestamp from timesync is not the same as time_boot_ms I saw in Qgroundcontrol. It will cause the logger won’t log correct data at correct timestamp.
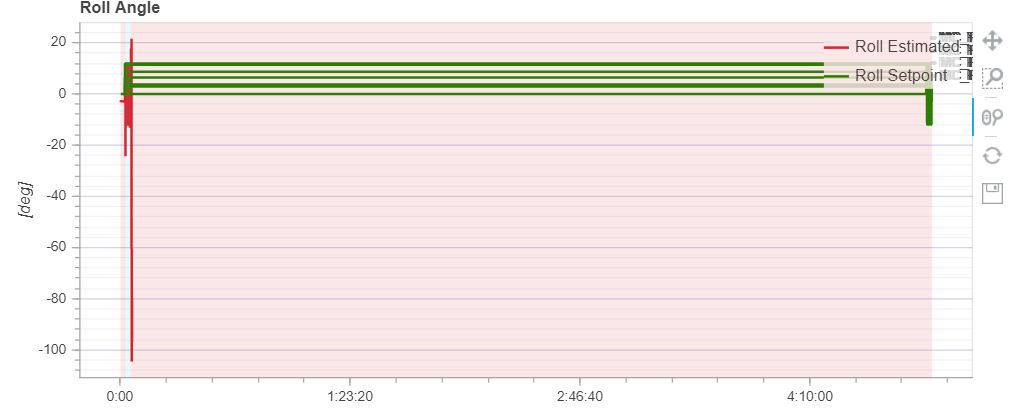
The following figure is the data from ulog.
The setpoint can’t fit the estimate point.
Have anyone face the same problem and solve it?
thanks!!