In a recent flight, we experienced that the drone flew past a waypoint, braked, reversed, and accepted the waypoint when it was outside the acceptance sphere. What could have happened that caused this behaviour?
It is also worth noting that the drone flew in a strong gust wind causing heavy vibrations. The additional strong acceleration during the braking then resulted in a global position loss due to the horizontal innovation test ratio failing. This again lead to a failsafe landing that caused a crash. Due to a battery fire, the only data we have is what we gathered from the telemetry log.
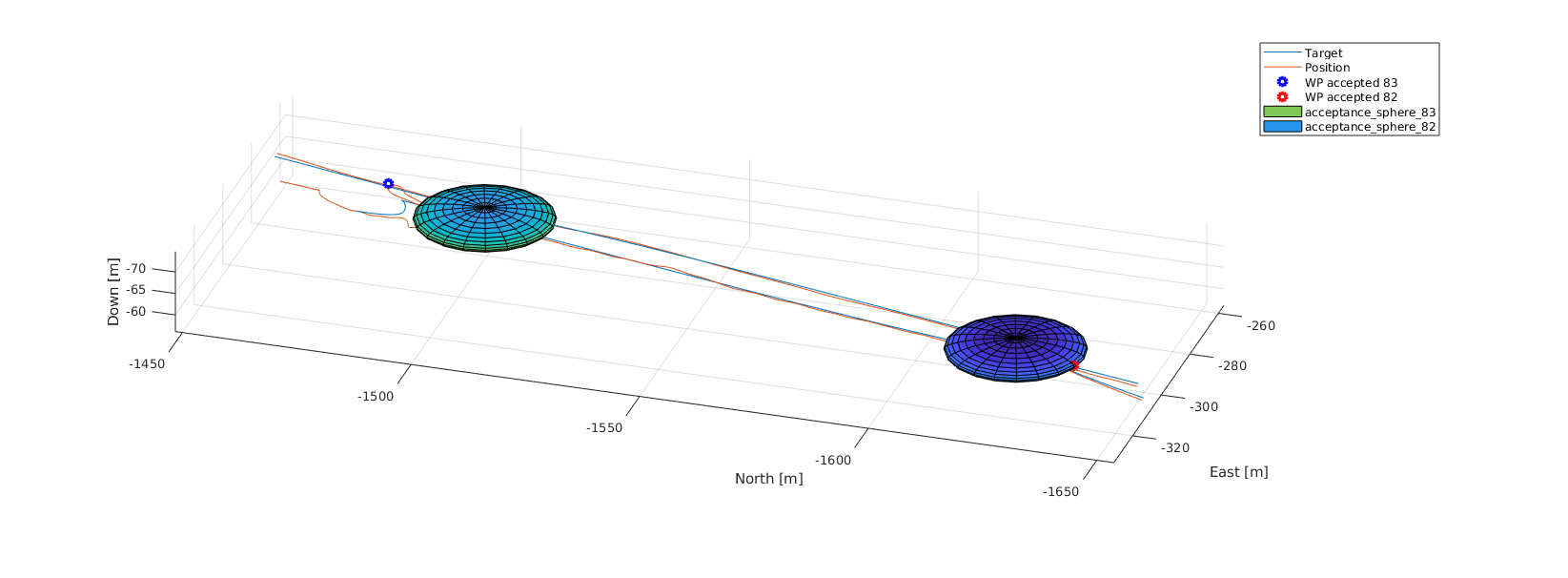
- In this plot the drone has flown past WP 82, which was accepted as expected when it reached the acceptance radius. The next WP 83 is on a continuous straight line, which is not considered reached until it has flown past the acceptance radius.
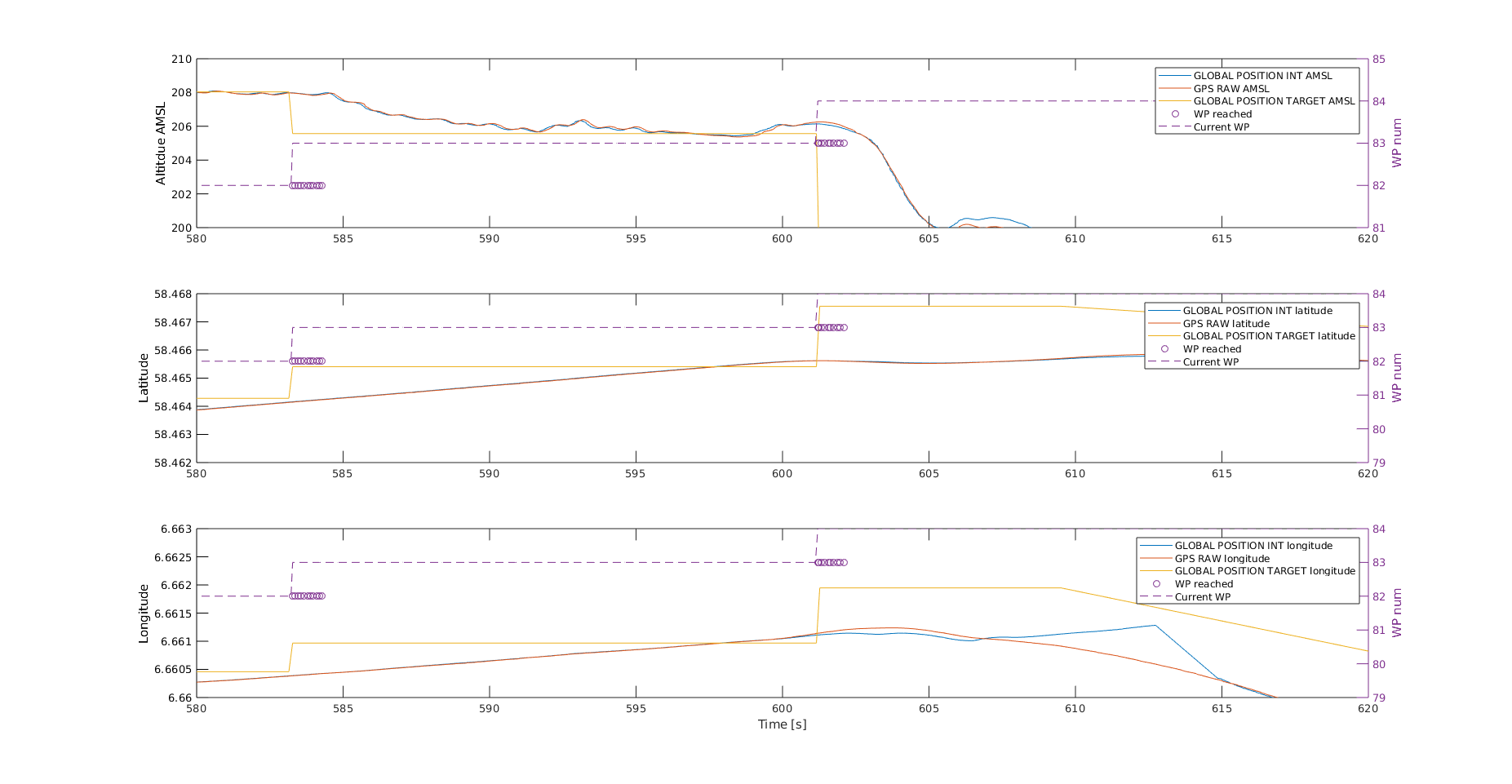
- Same info as a timeline