Hello everyone, I would like to use the ROS toolbox in Simulink to control a rover running with px4, combined with a Jetson TX2.
The system I am using is:
Ubuntu: 18.04
ROS version: Melodic
px4 firmware: v1.13.2
Vehicle : Rover
Px4 connect : MAIN OUT 2 、MAIN OUT 4
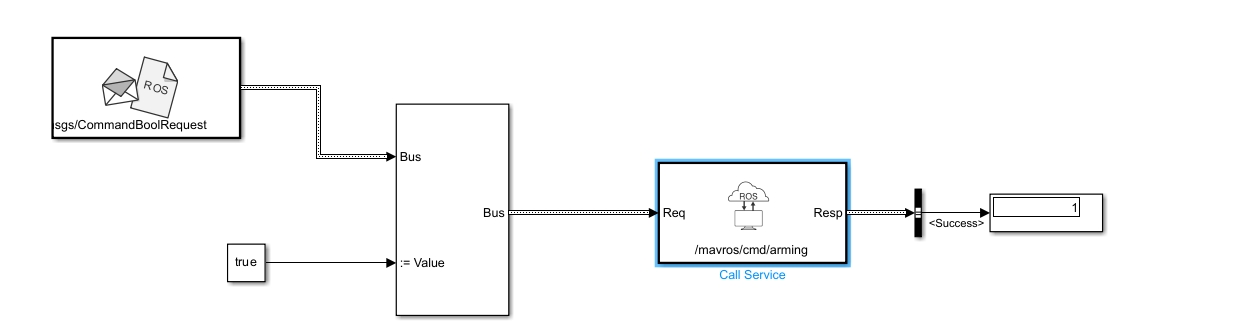
I have used the “call service” block in Simulink to transmit signals for arming or disarming, and it was successful in Arming. Please see the picture.
However, when I use the “/mavros/manual_control/send” block in Simulink to transmit signals, it can publish correctly in the topic, but my px4 does not respond. I would like to ask if anyone knows why?

Thank you for help.