Dear all,
When I enable the UAVCAN for VTOL ESCs, the PX4 stops outputting PWM to servos. I verified this with an oscilloscope. However, it can still output PWM temporarily, if motor test commands from the Qgroundcontrol is sent.
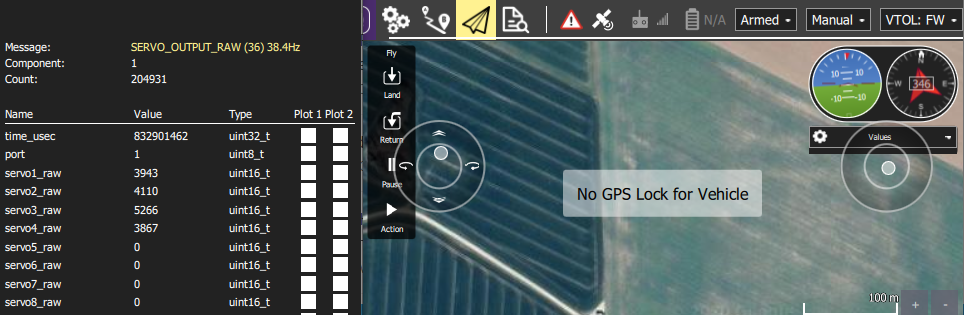
When the UAVCAN_ENABLE = 3, SERVO_OUTPUT_RAW message at the MAVLink inspector is like below. Obviously it is sending all surface values from the UAVCAN. However I need surface 1, 2, 3, 4 as PWM while 5,6,7,8 are UAVCAN.
May someone guide me on this issue about which part of the source code I need to do such modification?
- In Fixed Wing Mode
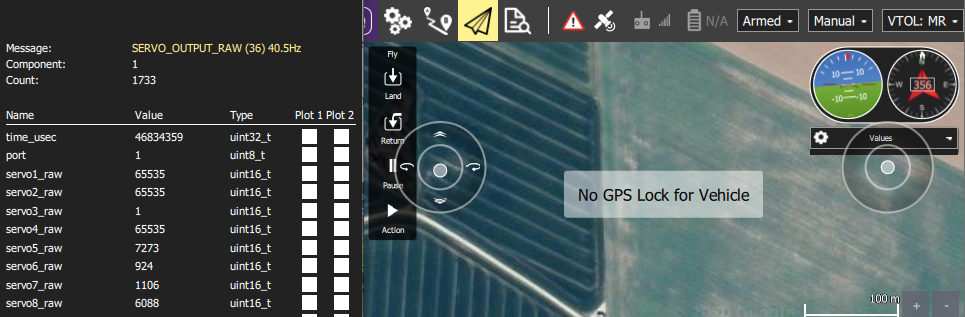
- In Multirotor Mode
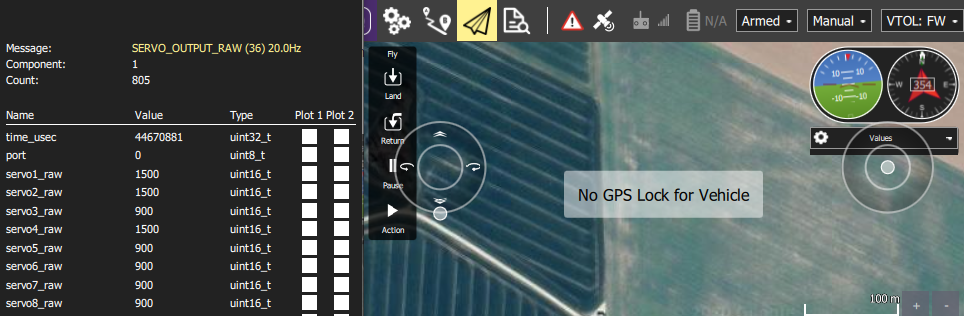
- When UAVCAN_ENABLE = 0 (The values are PWM microseconds)
Surface mapping is:
- Servo_1: Aileron
- Servo_2: Left Ruddervator
- Servo_3: Forward propulsion ESC
- Servo_4: Right Ruddervator
- Servo_5: Front Right VTOL ESC
- Servo_6: Rear Left VTOL ESC
- Servo_7: Front Left VTOL ESC
- Servo_8: Rear Right VTOL ESC