Hello, I have a ROVER model that I use together with a VOXL-CAM, that is capable of visually estimating the odometry (local position values) of the circuit path, due to the circuit being underground and no GPS signal is available, the information is sent to the CUAV X7 Flight Controller where I can recover the data using the SD card slot.
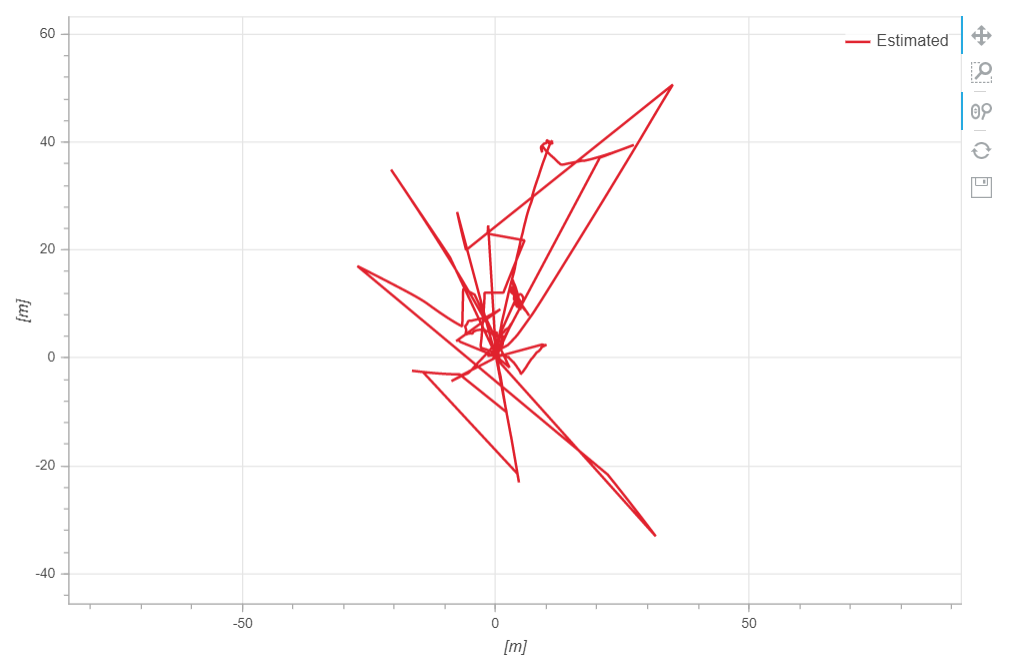
I have a problem where, for some reason, while in the circuit with the QGroundControl controller the local position of the odometer is reseted in some specific places (as shown in the figure below), I belive due to the camera losing reference.

I was wondering if there was a way to correct this error so I could correctly estimate the position. If not possible would there be a way to export the *.ulg file to a *.csv for example and then manually removing the problematic points, and then re-exporting it to *.ulg so I could visualize the data in the logs.px4.io website?