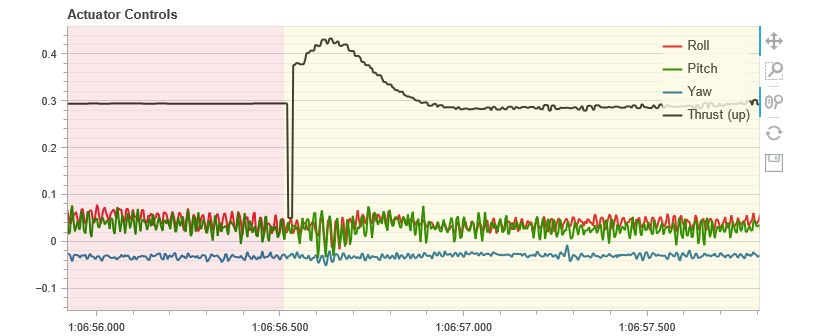
When transitioning from Manual to Altitude flight mode, the thrust momentarily drops out, followed by a hard kick, after which it settles within half a second (log).
In manual mode there is no position setpoint, therefore the first (logged) sample is from directly after the mode switch into altitude mode. The image below shows a one second of the message’s fields acceleration[2] and thrust[2]:
The thrust setpoint correlates with the actuator controls message depicted in the first post, as it is in fact the same signal. The acceleration setpoint in the down direction also matches the observed behavior; a commanded downwards acceleration of ~10g is likely to cause a low thrust setpoint.
To me it seems like the initial acceleration[2] setpoint is the main issue here.