Hey, I want to get pose of sonar relative to drone;
Currently It’s getting the pose from this file:
and I need to get sonar pose to distinguish multiple sensors in MAVLINK messages…
Hey, I want to get pose of sonar relative to drone;
Currently It’s getting the pose from this file:
and I need to get sonar pose to distinguish multiple sensors in MAVLINK messages…
OK, I figured out that pose is published in OnNewScans() function in:
but problem is how orientation field is set in DISTANCE_SENSOR message
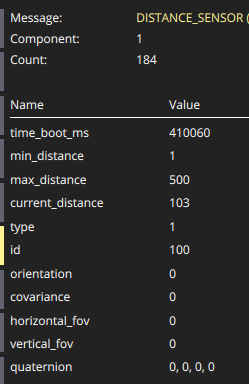
@TSC21 excuse me, could you explain me how Quaternions are translated to orientation field?