we used stand plane firmware and arm the pix, but the servo output is lock in 1500 and no response if we do anything
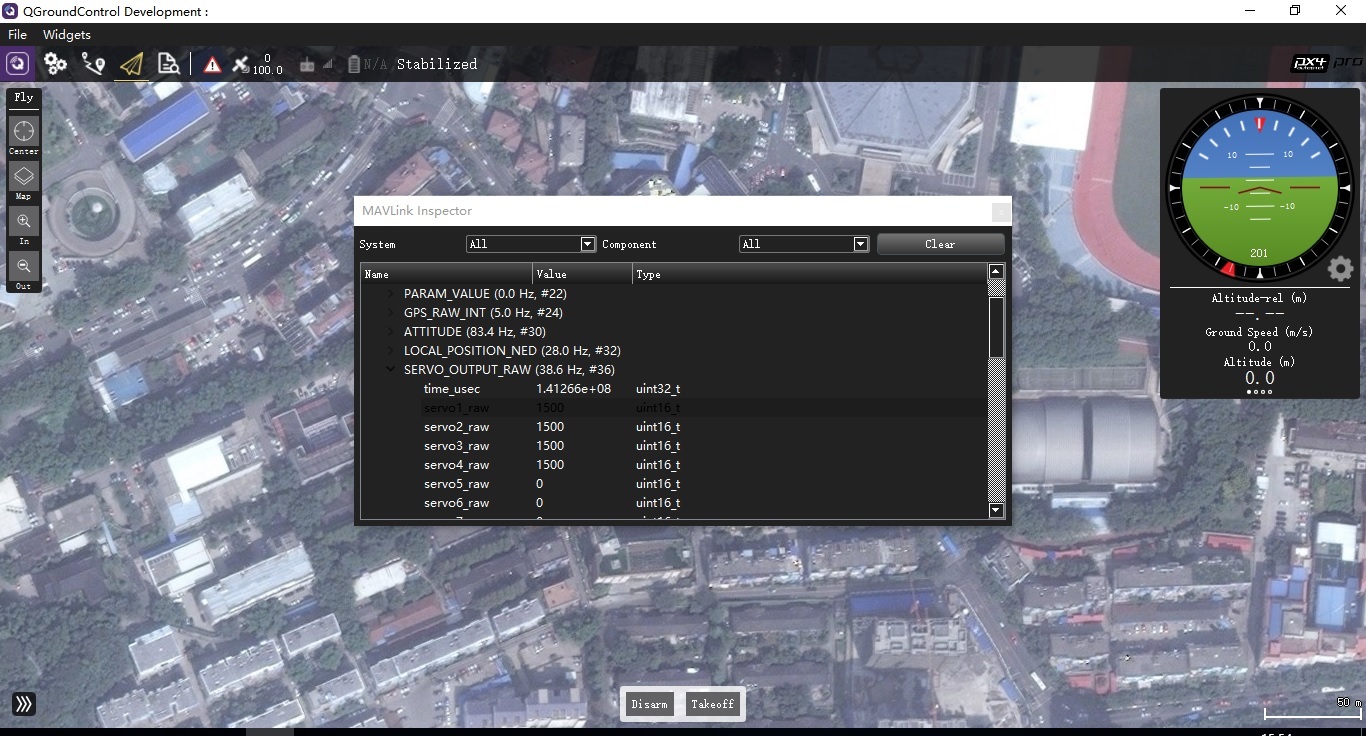
we plugin the servo and have response, so it looks like this is the bug for the mavlink message
when you do pwm test, fmu output will not show in QGC
QGC can show pwm value and update in PX4FMU::cycle()