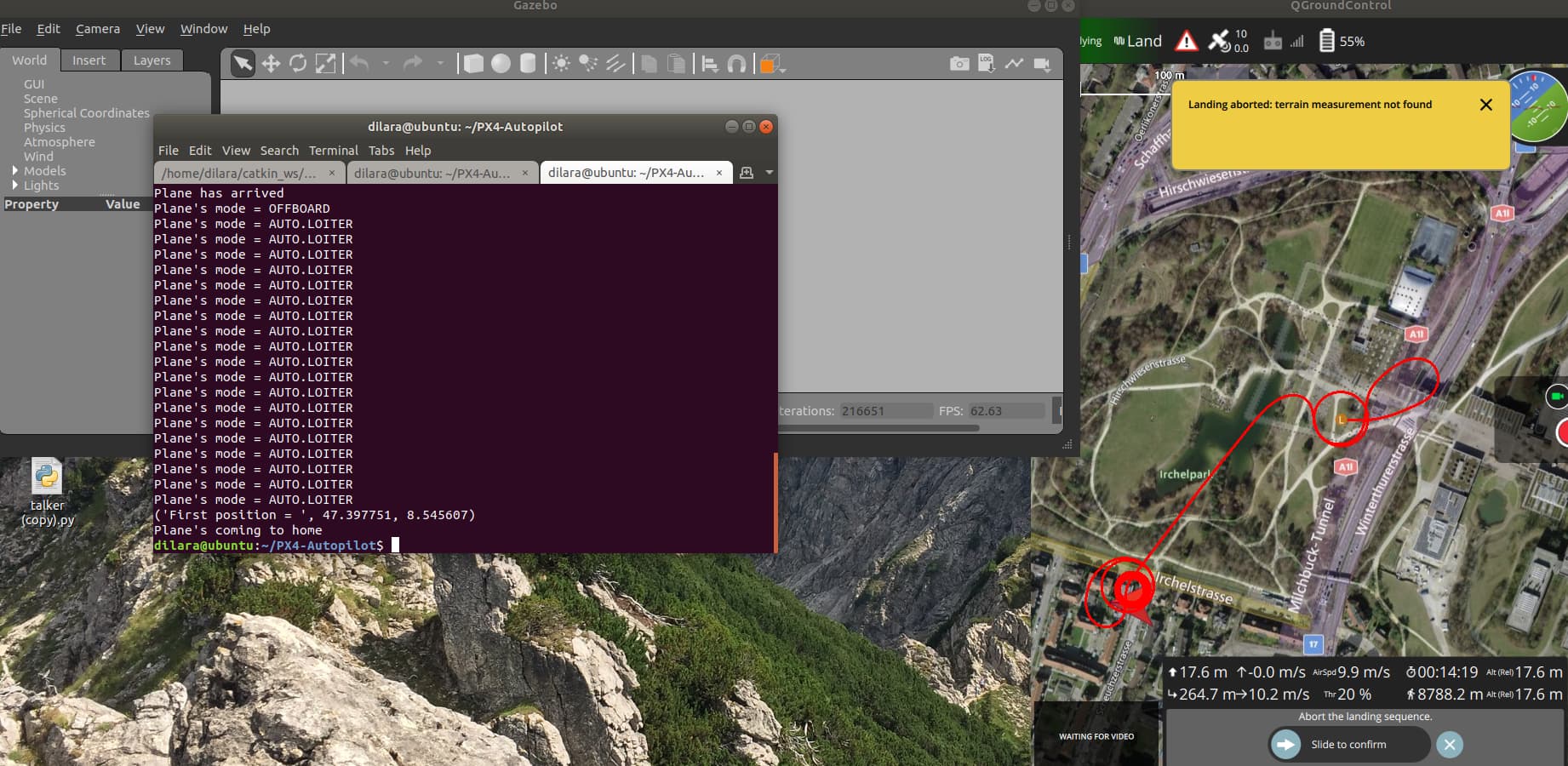
Guys, I need to fix this issue. I am a new learner of px4. When I run my script, I always see the message. Could you help me? My vehicle is fixed wing.
More information would be useful:
- What is the PX4 version / git hash you are using?
- Do you have a log? (.ulg file, which you can upload to Flight Review, and share the link: Log Analysis using Flight Review | PX4 User Guide)
- What kind of script is it?
- My px4 version is 1.14.0
- My log link is = https://logs.px4.io/plot_app?log=bd9fab26-e98a-4dbd-9fbb-36b0c5dea928
- I use python script and ros for autonomous flight
- My ubuntu version is 18.04
- My ros distributions Melodic morenia
- and last thing is , I used the code for changing to land mode
this is my code =
btw Thanks for your helping
Your simulation doesn’t seem to include a distance sensor topic. By default the FW landing logic aborts the landing if there is no valid distance to ground estimate (from a distance sensor). You can disable this check by setting FW_LND_USETER to 0.
Guys. I’ve solved the problem. I’ve deleted the ubuntu and installed all programs. And it’s solved.