Hey folks!
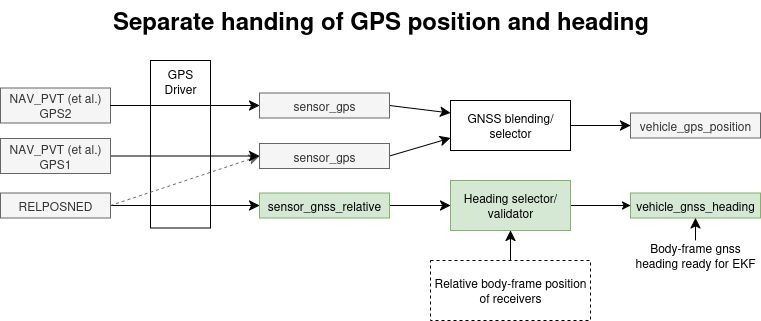
We’re developed and are flying with a setup in our 1.13 fork where GNSS heading is handled separately from position instead of being tied into GPS blending. Right now, blending mixes concepts that don’t really belong together, so we added a sensor bridge that publishes vehicle_gnss_heading from sensor_gnss_relative. This makes heading cleaner, easier to debug, and independent of position logic.
I’ve created a draft PR with the relevant changes from what we currently fly with, with an extensive description of the background and reasoning behind. Concept: Separate GNSS position and heading topics by oystub · Pull Request #25516 · PX4/PX4-Autopilot · GitHub
It’s based on 1.13, but most of the logic only needs minor adjustments up to 1.15 (I don’t have the full overview of 1.16 yet). We would be happy to do the required modifications, and refinements for getting this upstream. We’re also (finally) moving away from 1.13 to 1.15 or 16 for our production drones.
However, before pushing further, we’d really like to hear what you other developers and community members think about the way forward for the GNSS logic in PX4. Hopefully we can have a quick chat about it at the call today ![]()